Éléonore Fraisse¶
Stage 2nde du 10/06 au 14/06.¶
Jour 1¶
Matin : Démontage entier du robot, montage du robot de plus grande dimension : découpe des flans et des plaques (face de dessous et celle de dessus), assemblage des moteurs sur le flancs.
Après-midi : Assemblage des plaques électroniques sur la plaque de dessus. Conception du circuit électronique et test. Programmation : Application sur le téléphone (desinger & blocks) & serveur. montage : collage des différentes parties du robot avec de la colle à bois.
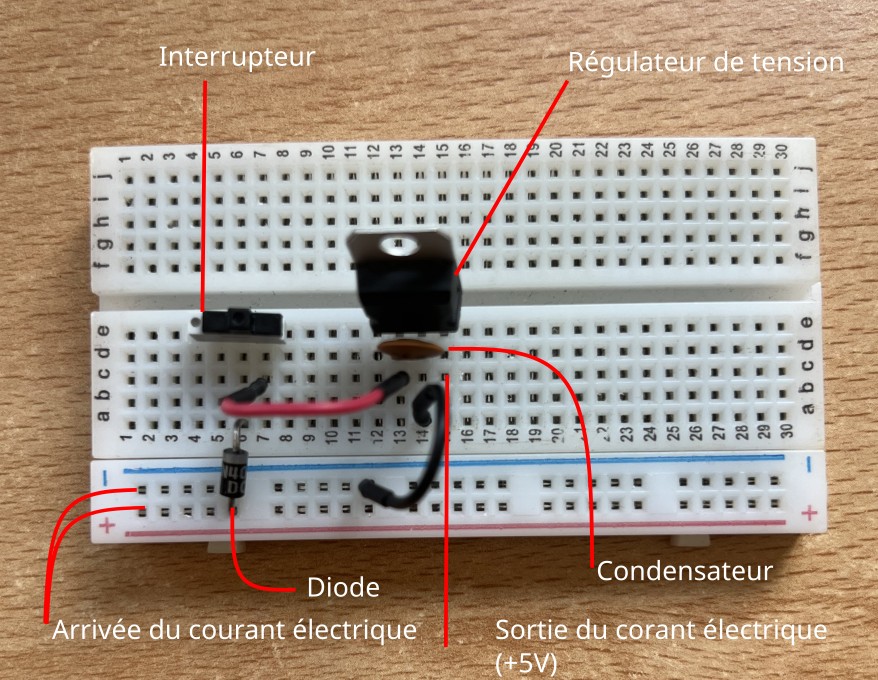
Circuit d'alimentation du robot (plaque du dessus).

Pièce : Moteur et contrôleur de moteur (contrôleur à monter sur la plaque du dessus).
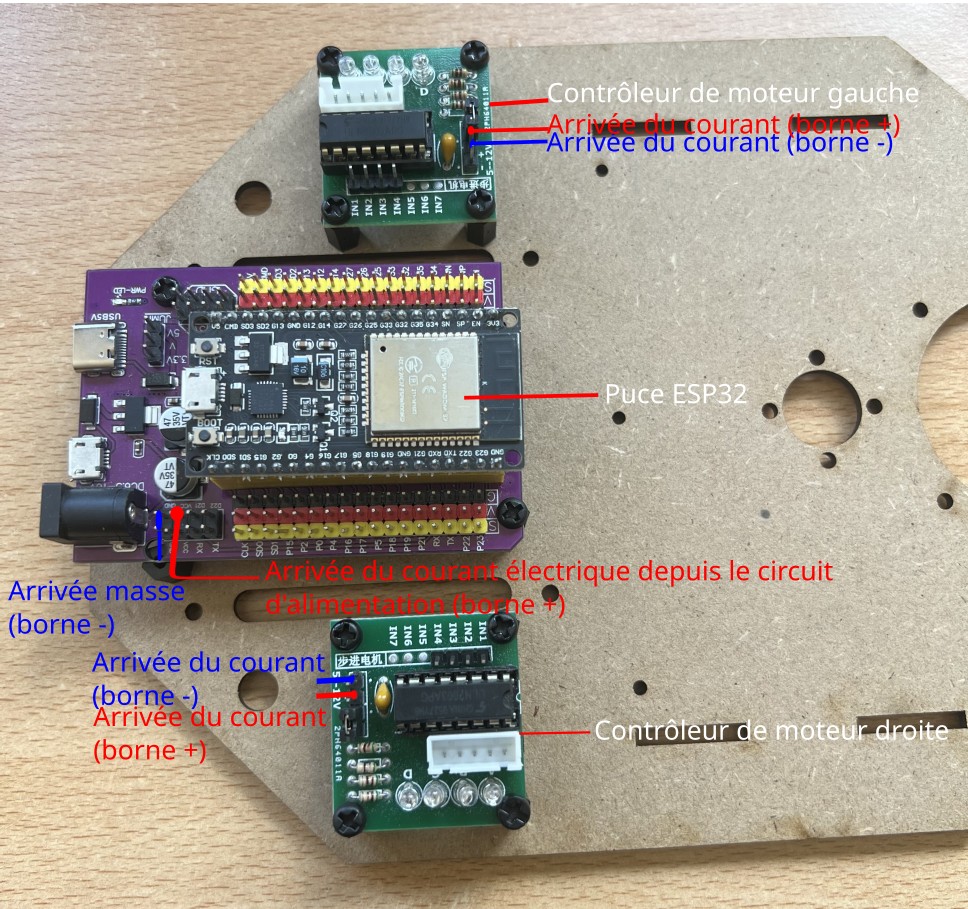
Montage de la puce ESP32 du robot et les contrôleurs des moteurs, montés sur des entretoises (plaque du dessus).
Notes :
- Montage : bien mettre les moteurs des roues dans le bon sens et les fils vers l'intérieur du châssis. Entretoises entre le bois et le circuit
- Certains trous pour les visses sur la plaque de dessus sont un peu petits (les visses restent bloqué)
- Trou pour la visse en bas a droite de l'expansion board mal placé : un peu trop vers la droite
- Pour la programmation : dire quelle librairie installer (fichier C++)
Jour 2¶
Matin : Assemblage final : branchements : ESP32 avec moteurs, alimentation des moteurs, piles. Test du robot. Soudage à l'étain sur les câbles reliant les piles au circuit électronique.
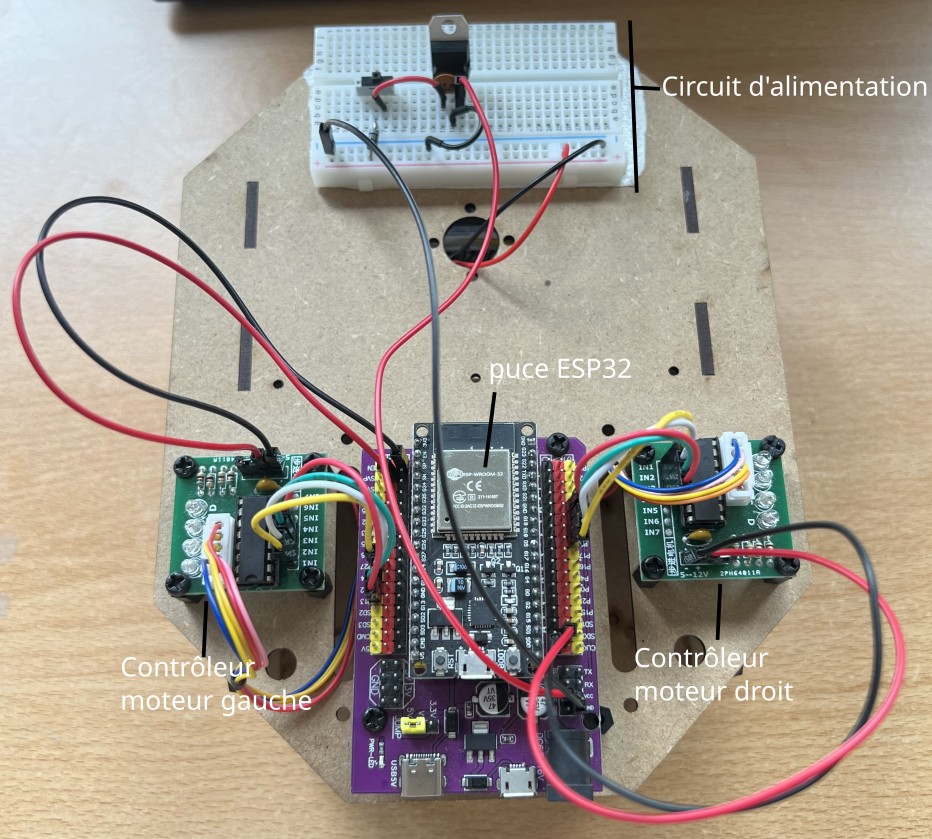
Montage de la plaque du haut fini.
Après-midi : Modélisation sur FreeCad. Perfectionnement du robot : placement des piles sur l'avant pour rééquilibrer le poids sur le robot afin qu'il avance correctement (tout droit).
Notes :
- Dans "Assemblage final" : préciser sur quelle ligne de l'ESP32 (S, V ou G) effectuer les différents branchements avec les moteurs.
- Branchements des moteurs (alimentation avec ESP32)
- Mettre les piles vers l'avant du robot (rééquilibrer le poids)
Jour 3¶
Matin : fin de wiki sur le robot. Tuto Freecad et modélisation du dé à jouer (tuto Freecad : https://tube.aquilenet.fr/w/p/1kRD5Ef5AVYJz3qydiStDN)
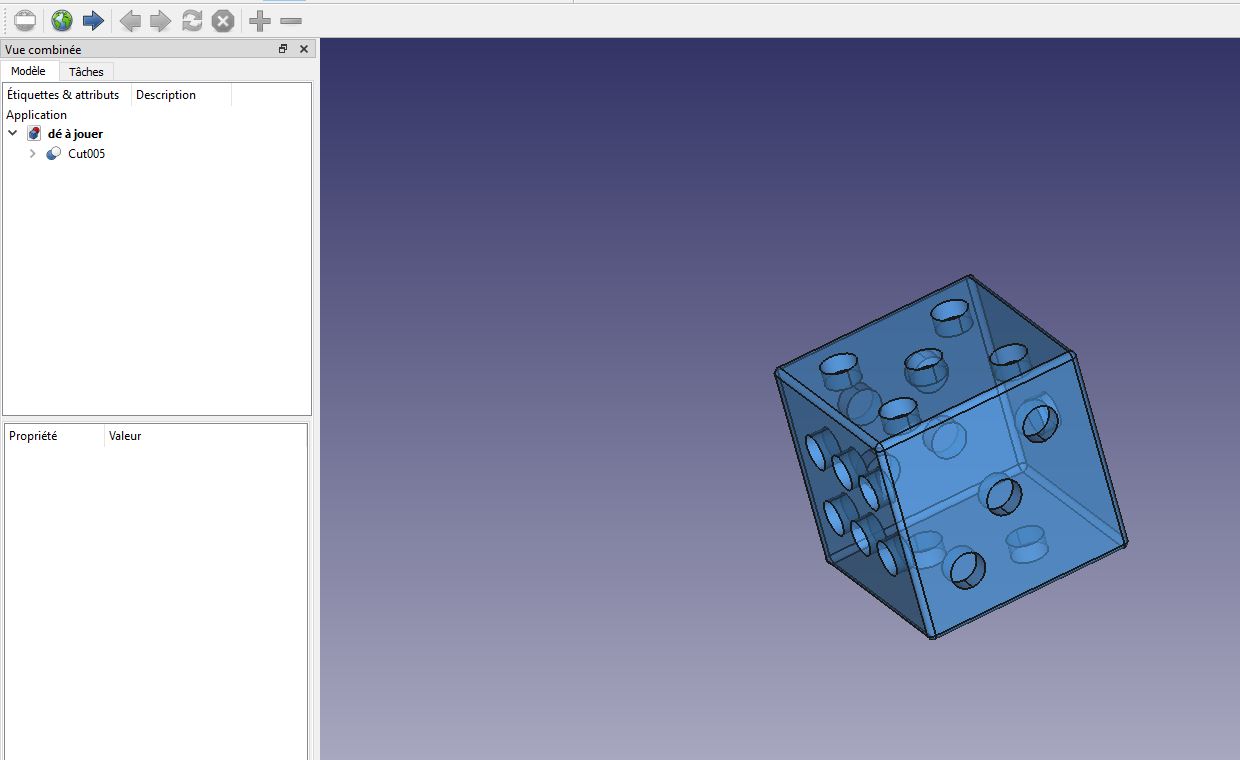
Modélisation du dé à jouer.
Après-midi : modélisation sur Freecad du mode de fixation (par clips) de la coque du robot (système de rivet) et impression 3D de la pièce.
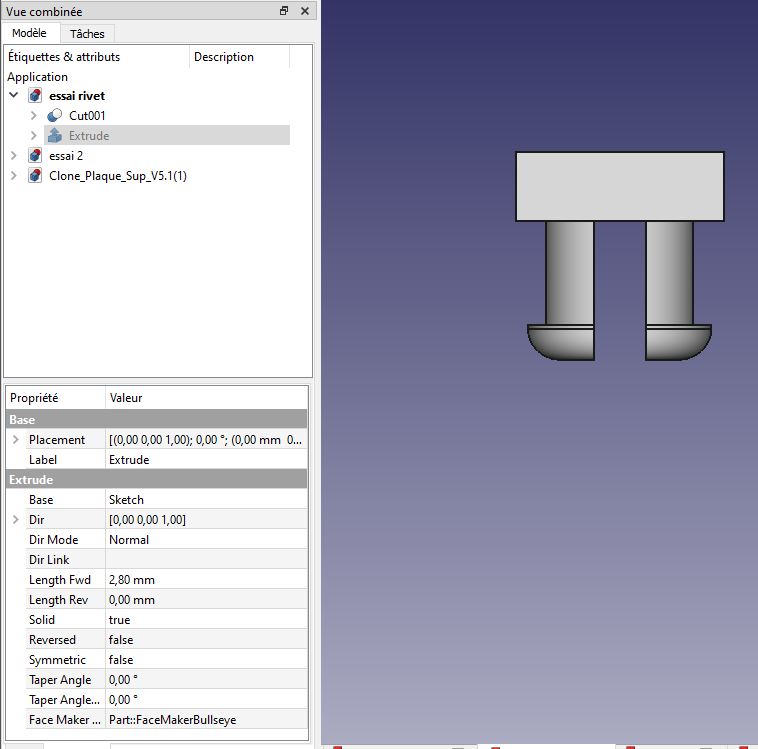
Modélisation du rivet (5mm).
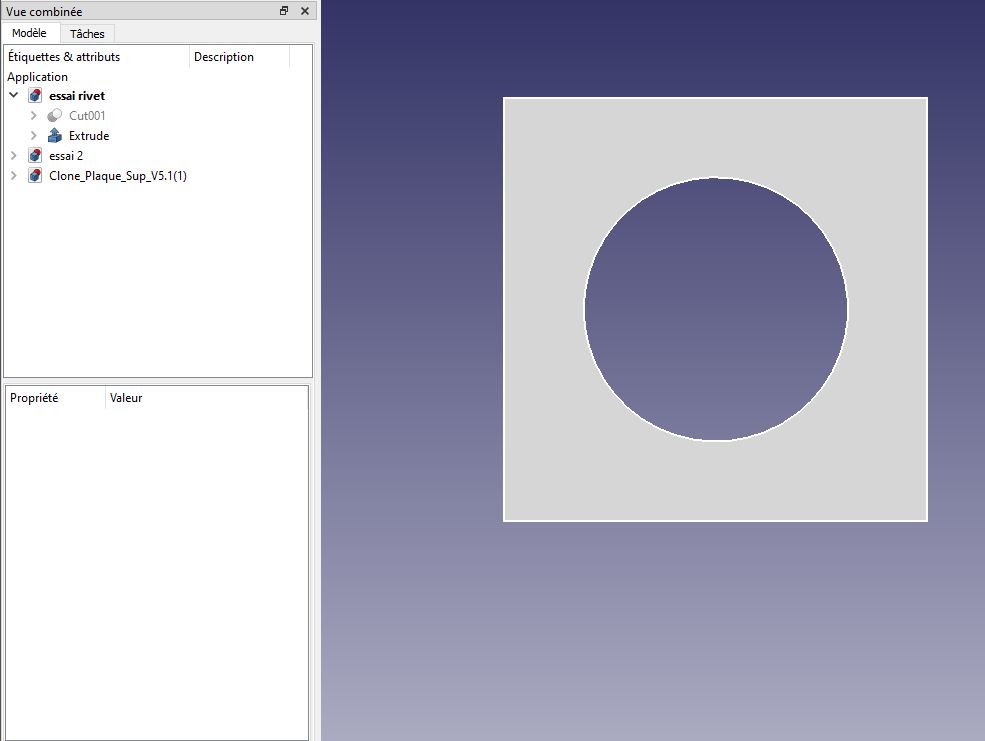
Modélisation d'un trou (5mm) sur la plaque du dessus du robot.
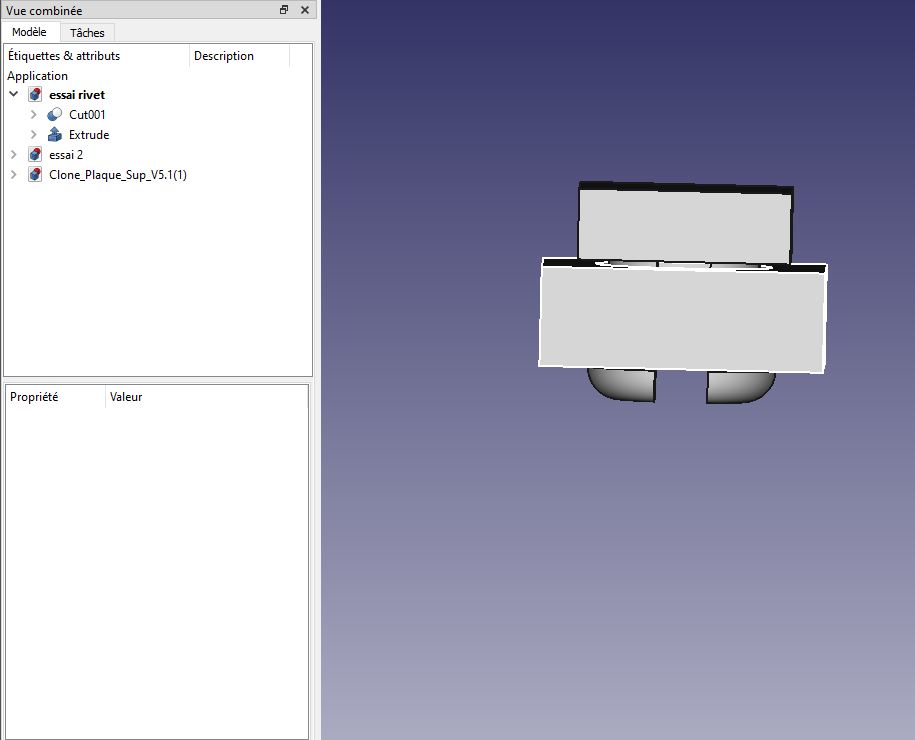
Modélisation de l'assemblage final du système de fixation de la coque du robot.
Notes :
- Sur la modélisation : rivet de 5 mm donc pas le même diamètre que sur la nouvelle plaque du dessus (pour la coque).
Jour 4¶
Matin : Visite de SGM et démonstration du thermoformage (thermoformage à partir de plastique) de la coque du robot.
Après-midi : Modélisation de la pièce avec les rivet à clipser sur la plaque du dessus du robot pour pouvoir fixer la coque et fusion avec les rivet (création de la pièce de fixation avec les rivets).
Modélisation de la pièce fixée sur la plaque.
- Impression 3D : pièce de fixation avec rivets.
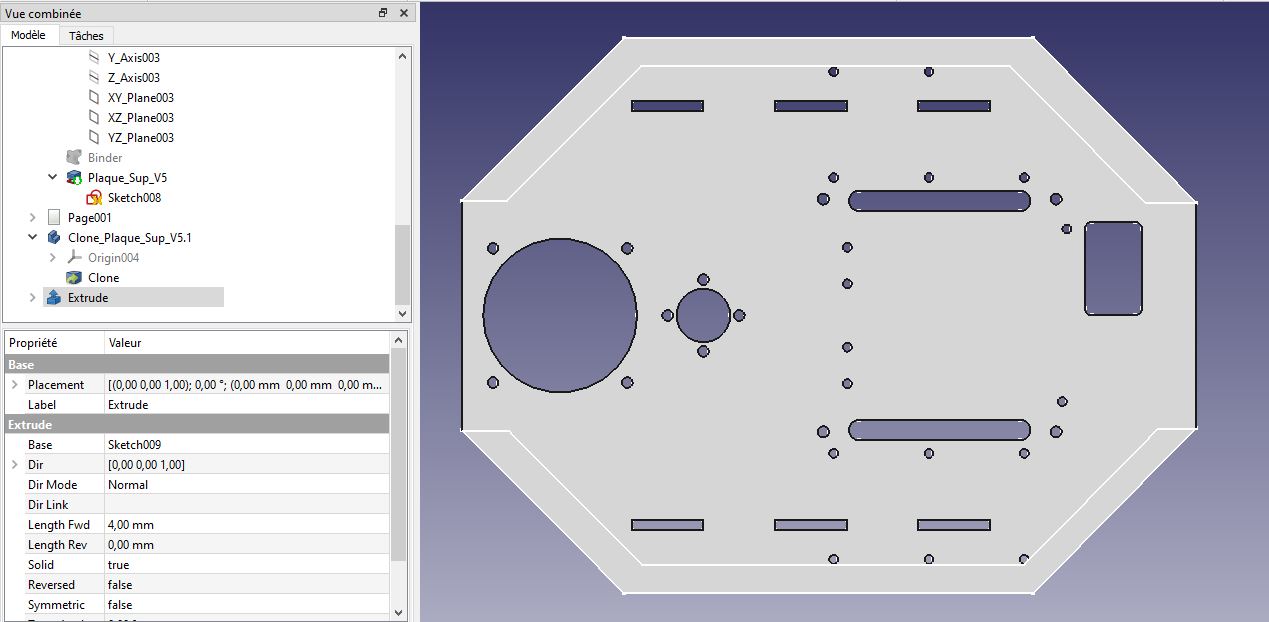
- Découpe Laser : nouvelle plaque du dessus avec les trous de 5 mm.
Découpe de la coque et assemblage de la plaque avec la pièce de fixation.
Problèmes rencontrés lors de l'assemblage :
- Les rivets se cassent vite >> peut-être utiliser un matériau plus résistant que le PLA.
- Arêtes de la coque un peu trop arrondies comparé à la plaque et à la pièce de fixation (>> moule ?).
- Arêtes extérieures de la pièce de fixation ont un angle différents que l'angle de la coque >> modifier la pièce de fixation : chanfrein
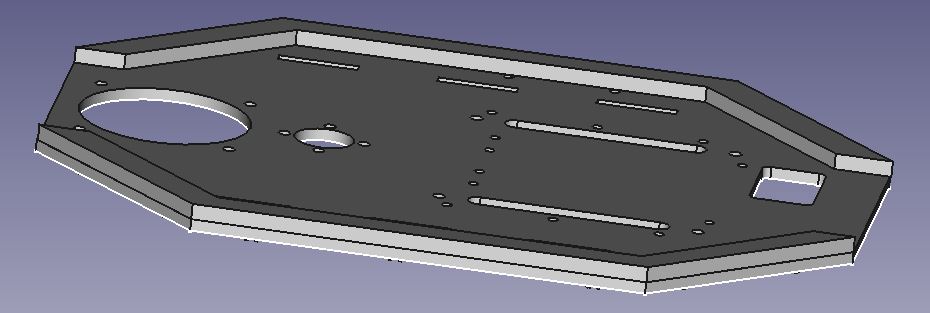
Arêtes extérieures de la pièce de fixation avant chanfrein.

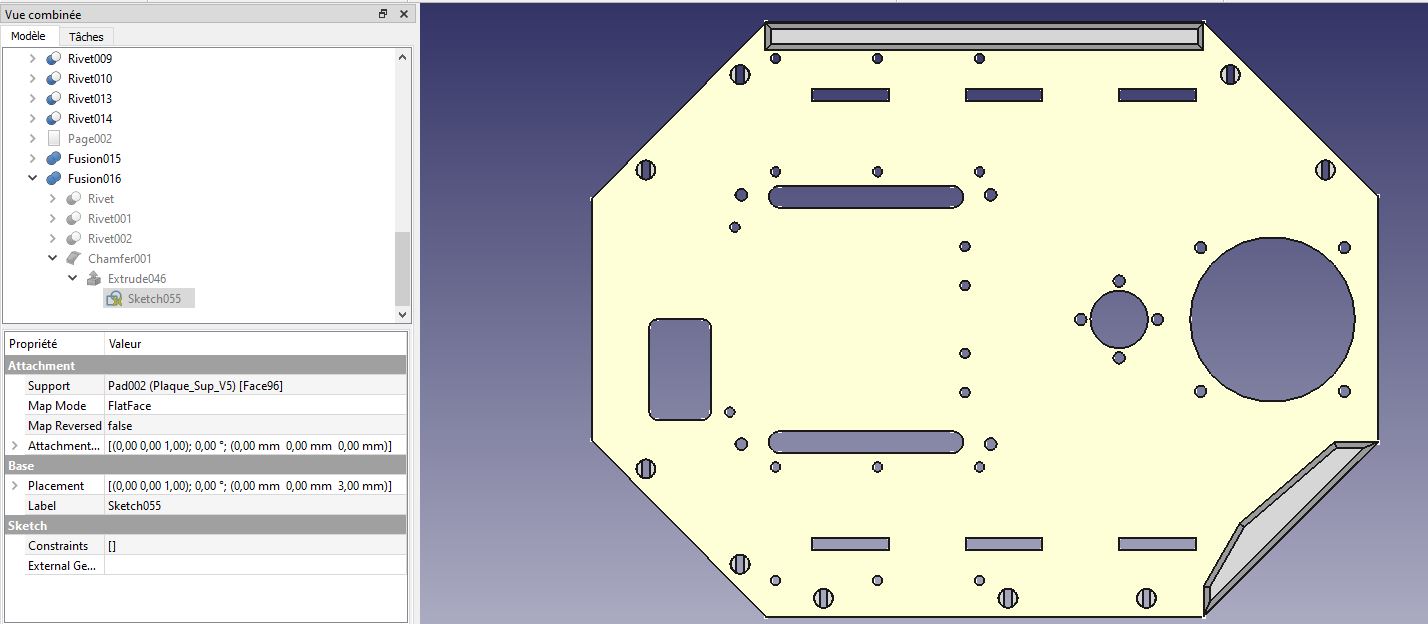
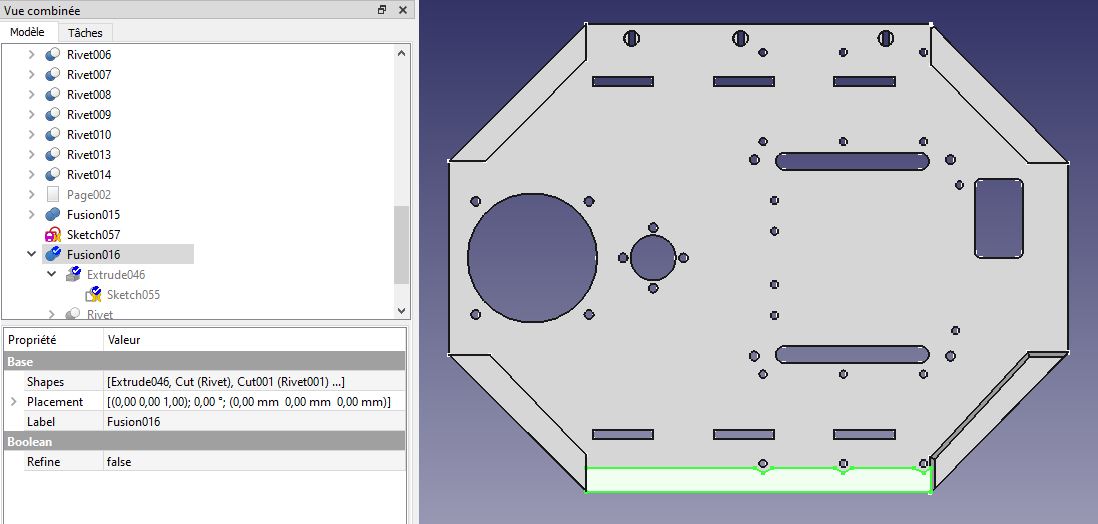
Arêtes extérieures de la pièce de fixation après chanfrein (2mm).
Jour 5¶
Matin : Amélioration de la pièce de fixation de la coque sur Freecad (essai). Impression 3D des parties de la nouvelle pièce.
Essai d'amélioration de la pièce de fixation (chanfrein, symétrie...)
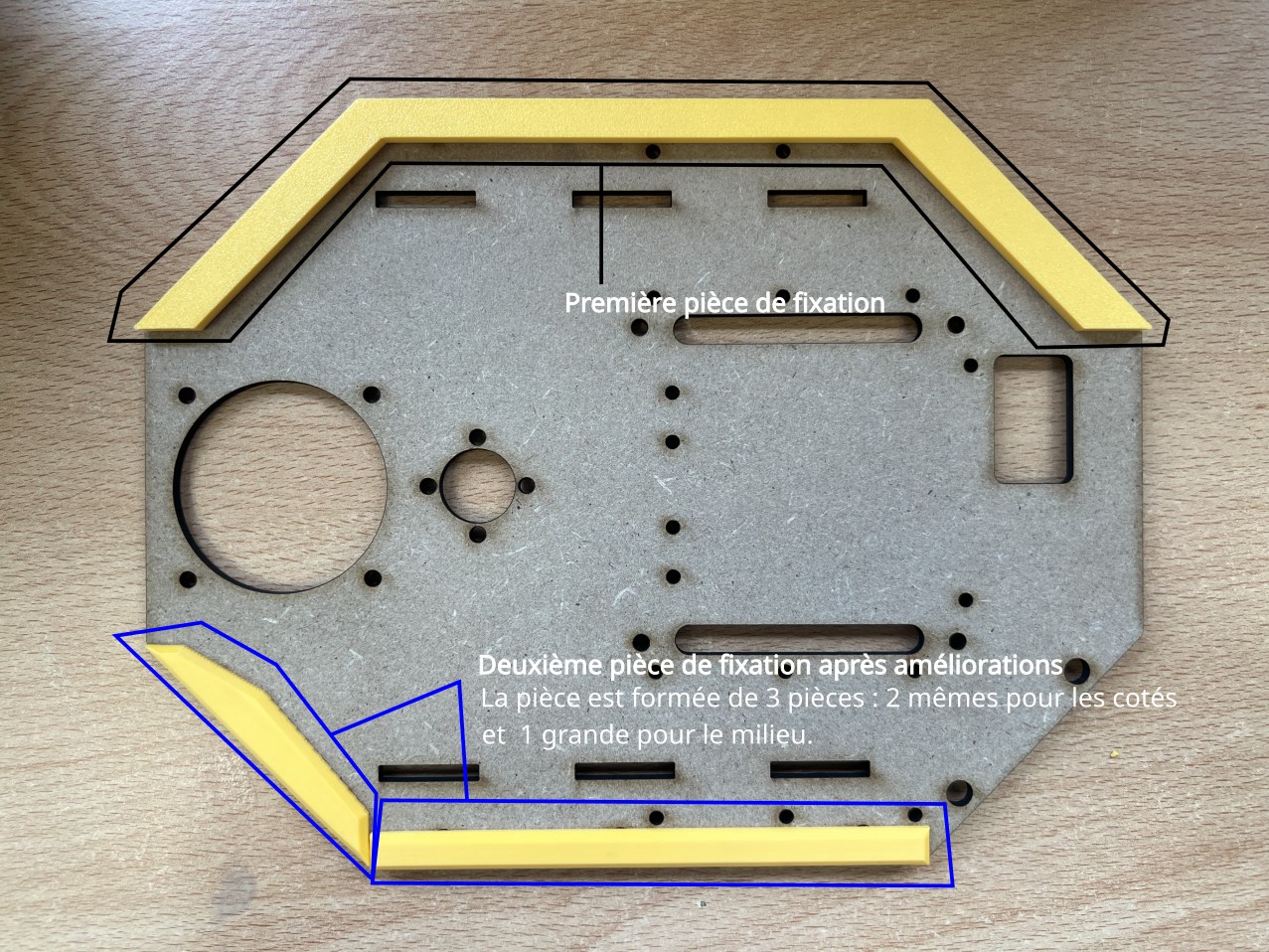
Différences entre la pièce de fixation de base et celle avec les améliorations.
Après-midi : amélioration et impression 3D de la pièce de fixation (hexagones pour entretoises)
Pièce de fixation à hexagones.
Notes :
- Pièce de fixation : partie rectangulaire de la pièce : faire 2 pièces différentes pour le coté droit et le coté gauche car certains trous pour les rivets ne sont pas symétriques : trous pour rivet sur le bas (voir image)
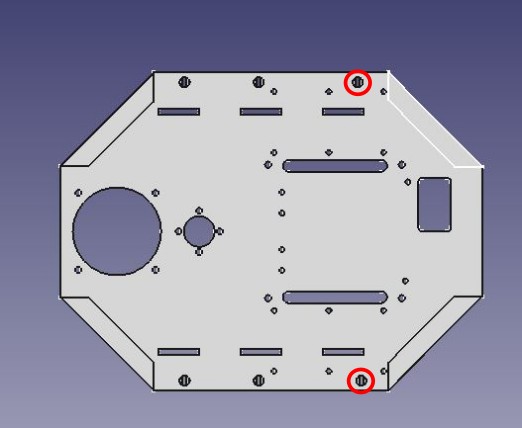
Trous pour rivets pas symétriques.
Avant l'atelier, je pense qu'il faudrait vérifier rapidement si les entretoises pour fixer les contrôleurs de moteur passe bien contre les pièces de fixation et voir si tous les trous sont bien symétriques. Sur la coque, il manque juste à percer les trous pour faire passer la LED !
Merci beaucoup pour votre accueil cette semaine, c'était très intéressant et je me suis beaucoup amusée !!!