Jordan Santamaria¶
Je m'appelle Jordan Santamaria, je suis actuellement en première année de BTS SNEC ( Services numériques option électronique et communication ).
Je m'occupe du projet "Amplificator" qui est un projet initié par Christophe Boery et Pascle Celerier dont le but est de créer une aide auditive pour les personnes âgées de l'EHPAD Terre-Nègre à Bordeaux.
J'ai également fais un projet personnel sur un papercraft, donc en modelisation 3D sur blender, découpe laser, assemblage etc...
Objectifs de ce projet : ¶
Créer une aide auditive artisanale avec des coût de fabrication peu élevé afin d'aider les personnes âgées pour ainsi leurs éviter de payer des vraies aides auditives hors de prix.
Principe de l'aide auditive :¶
Il s'agit d'un modèle relativement simple composé d'un pistolet parabolique et avec un micro unidirectionnel relié à un boîtier auquel sera mis un micro omnidirectionnel. La personne âgée sera donc muni d'un casque ( lui aussi relié au boîtier) et du pistolet parabolique, elle entendra les sons et voix émises dans la pièce auquel se trouvera par le micro omnidirectionnel puis lorsqu'elle appuiera sur la gâchette en visant une direction, elle entendra précisément la direction visée avec donc le micro directionnel.
22/05/2023¶
Arrivé au fablab, nous avons commencé à parler du projet avec les autres membres du groupe, nous avons choisi comme base de départ, un modèle déjà existant:
Le modèle en question: [[https://www.amazon.com/Nature-Observing-Listening-Recording-Electronic/dp/B00D3N91UG]]
!
!
Puis à partir de ce modèle,nous avons démonté le pistolet afin de voir a quoi cela ressemblait de l'intérieur et de voir le type de micro qu'il y avait puis nous avons commencé a observer quelques problèmes qui pourrait y avoir, par exemple la forme du pistolet, qui n'était pas forcément ergonomique pour une personne âgée et donc nous avons réfléchis a une autre type de forme, et nous avons pensé a un pistolet de température frontale.
Un exemple de possible forme du pistolet:
[[https://www.google.com/search?client=firefox-b-d&sxsrf=APwXEdfWZ0_2i0qCH-tKLGJL2CiNpQa-VA:1687873453923&q=pistolet+temperature&tbm=isch&sa=X&ved=2ahUKEwj-_ZXNyuP_AhW5U6QEHUWOB1AQ0pQJegQIBxAB&biw=1600&bih=796&dpr=1.2#imgrc=4v7dV3yhsjnwMM]]
Sur ce modèle on voit donc qu'il est plus ergonomique, la poignée est plus grande, la prise en main est plus simple. On a repris l'idée de nos anciens camarades qui ont travaillé sur ce projet avant nous sur le côté ergonomique, et on a suivi leurs potentiomètre modélisé pour qu'il soit assez gros pour pouvoir l'utiliser facilement ainsi que de changer la parabole pour ajuster la portée du signal en ajoutant une peau autour de la parabole afin que le son ne se disperse pas.
24/05/2023¶
Moi et mon camarade, étant orientés vers la partie électronique, nous avons donc commencé à réfléchir sur le problème de la bascule faite par la gâchette. Ce que nous voulons, c'était que sans appuyer sur la gâchette, le casque soit positionné sur les sons du micro omnidirectionnel et lorsqu'on appuie sur cette gâchette, le micro omnidirectionnel est désactivé et bascule sur le micro directionnel et puis lorsque la gâchette est relâché, cela revient à sa position de départ et donc revenir sur le micro omnidirectionnel.
Avant de réfléchir à ce problème, il fallait réfléchir à prendre des micros analogiques ou des micros numériques. et donc pour cela quels sont les avantages et inconvénients de l'un par rapport à l'autre? D'abord les microphones analogiques ont tendance a être simples à utiliser car ils ne nécessitent pas de traitement numérique complexe pour fonctionner correctement. De plus les microphones analogiques ont aussi tendance à avoir une latence plus faible que les microphones numériques car il faut un peu de temps pour convertir les ondes sonores acoustiques de l'analogique au numérique et inversement, et donc ne pas avoir de latence est toujours mieux pour des performances en direct comme ce projet. Donc nous allons opter pour des micros analogiques.
J'ai donc commencé a regarder des microphones sur radiospare pour pouvoir les commander, il y avait beaucoup de omnidirectionnel donc on s'est demande si ce n'était pas mieux de remplacer le micro directionnel du pistolet par un omnidirectionnel et de concentrer le signal avec une parabole mais nous avons finalement trouvé un microphone omni et unidirectionnel sur mouser:
Le microphone omnidirectionnel: [[https://www.mouser.fr/ProductDetail/PUI-Audio/AOM-6738L-R?qs=%252BDOaWfEBs1MTO3BAxLLbtA%3D%3D]]
Le microphone unidirectionnel : [[https://www.mouser.fr/ProductDetail/CUI-Devices/CMI-5247TF-K?qs=WyjlAZoYn52Jz2cx86oe5A%3D%3D]]
26/05/2023:¶
Ensuite j'ai vérifié que pour ces micros, leurs sensibilité étaient suffisante pour entendre des voix humaines par exemple et des chuchotements, car ce serait bête que les personnes âgées ne s'entendent pas entre eux.
J'ai donc regardé leurs datasheet afin de voir le minimum de leurs sensibilité, l'un était de 35 dB et l'autre de 44 dB.
datasheet du micro omni : [[https://www.mouser.fr/datasheet/2/334/AOM-6738L-R-68122.pdf]]
datasheet du micro uni : [[https://www.mouser.fr/datasheet/2/670/cmi_5247tf_k-1777142.pdf]]
Ensuite je me suis demandé si 44 dB était suffisant pour une sensibilité minimum pour pouvoir entendre une voix humaine d'une personne âgée et d'un chuchotement, car 35 dB je savais que cela était suffisant mais 44 j'avais un doute surtout pour des voix de personnes âgées. étant donné que une conversation normale se situe a peu près à 60 dB peut être que si une personne âgée parle assez doucement, 44dB serait un peu léger. J'ai donc effectué le test.
J'ai donc effectué un test à l'aide d'un enregistreur audio qui mesure les dB: Le H4n Pro.

J'ai donc branché un casque a cet enregistreur audio, j'ai donc d'abord simulé une conversation normale, l'appareil affichait bien une valeur largement supérieur à 44 dB ce que je m'attendais, puis j'ai ensuite chuchoté, et l'appareil affiché a peu près 45 dB ce qui suffisait donc étant donné que des personnes âgées allaient plus parler fort que chuchoter mais je voulais vérifier que même en chuchotant, cela marcherait quand même.
28/05/2023:¶
Aujourd'hui je me suis consacré sur la réflexion de la bascule entre le micro omnidirectionnel à unidirectionnel par la gâchette. Mon premier réflex est d'avoir directement pensé à un interrupteur afin de passer de l'un à l'autre mais après réflexion, je me suis dis que le rôle d'un interrupteur est plus pour soit activer ou désactiver et donc je me suis dis que c'était mieux d'utiliser un interrupteur à bascule autrement appelé commutateur qui pourra permettre de choisir entre plusieurs états actifs.
J'ai donc par la suite cherché un peu dans le fablab si il y en avait déjà ou si il fallait en commander, et j'ai vu des interrupteurs à bascule de fin de courses, j'ai marqué sa référence afin d'avoir le datasheet du composant:
datasheet de l'interrupteur à bascule : [[https://www.farnell.com/datasheets/3157126.pdf]]
30/05/2023:¶
J'ai donc d'abord tester l'interrupteur a bascule pour voir si il marchait bien et qu'il passait bien de l'état 1 à l'état 2, pour cela j'ai donc pensé à un test de continuité :j’ai donc utilisé un multimètre et j’ai ensuite placé les sondes au bornes du commutateur, le multimètre a bien émit un bip sonore vérifiant donc le passage de la voie 1 à la voie 2.
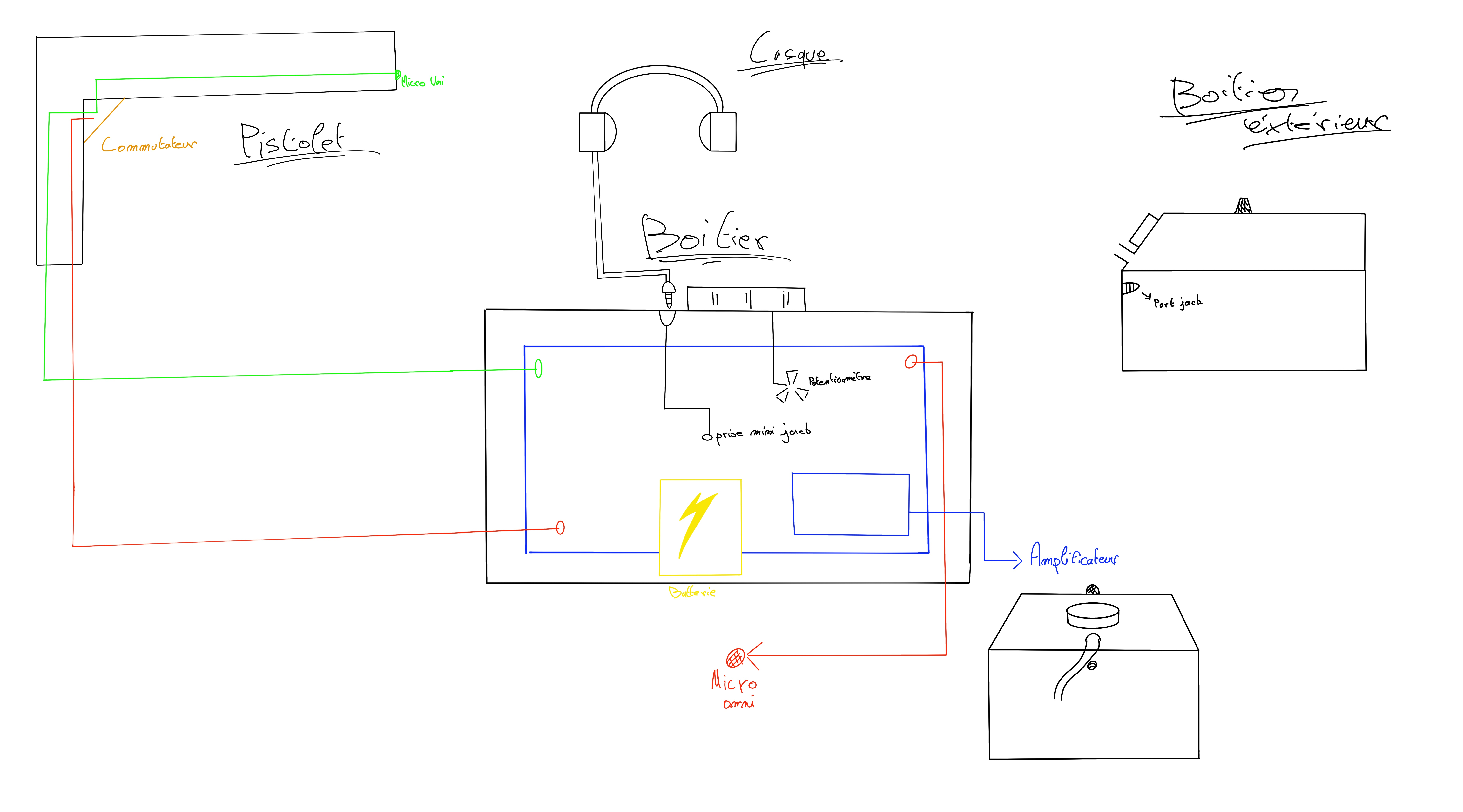
Ensuite avec l’équipe chargé du design et de l’ergonomie du pistolet et du boîtier, on a fais un résumé du système afin d’en faire un premier schéma de base :
!
!
02/06/2023:¶
Une fois occupé de la bascule, et ayant choisi les micros, je me suis alors consacré sur le système de l’amplificateur, car oui il faut que le son capté par les micros soit amplifiés afin que les personnes âgés puissent bien les entendre dans le casque. Donc je me suis demandé, quel ampli choisir ? Et comment le tester ?
J’ai donc fouillé un peu au fablab, j’ai vu dans un tiroir «son», un système de lecteur MP3 relié donc à un amplificateur, donc avant de le dessoudé pour le prendre, j’ai regardé sa datasheet afin de voir ses différents branchements :
la datasheet de l’amplificateur PAM8403: [[https://www.robot-maker.com/shop/composants/420-amplificateur-audio-5v-pam8403-420.html]]
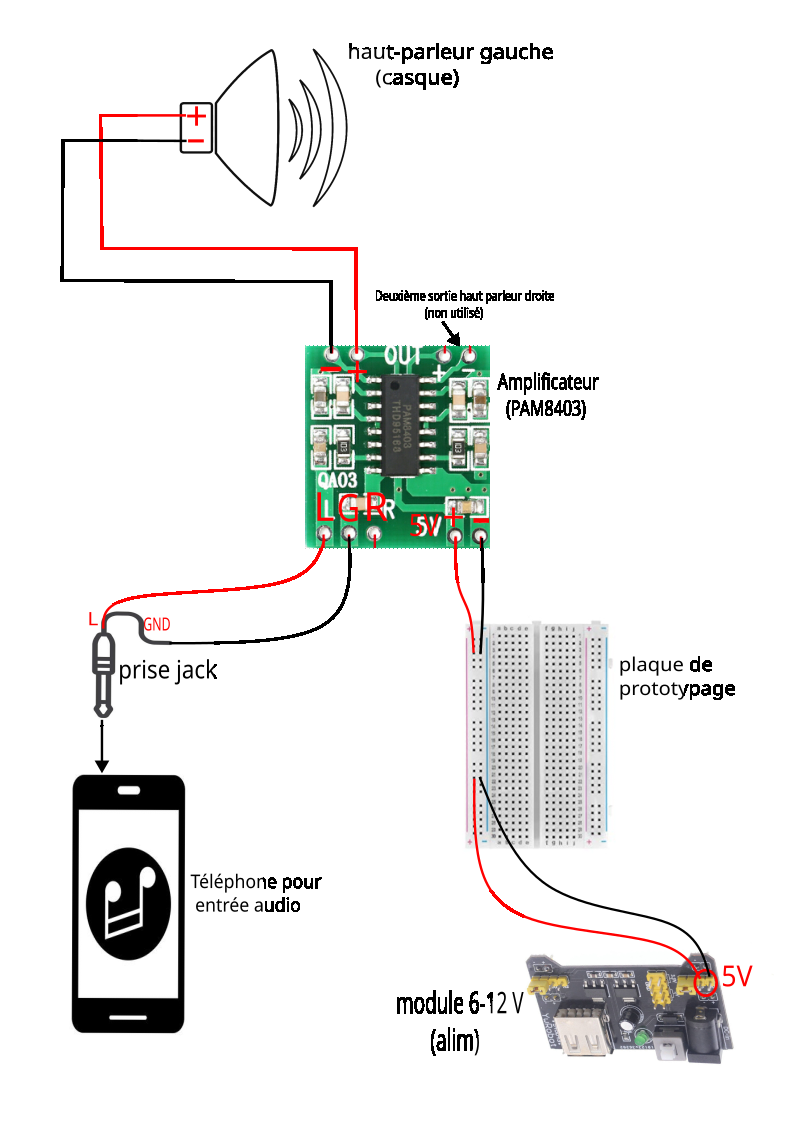
Une fois regardé la datasheet, j’ai pu bien identifié les entrées sorties pour le casque (dans le test de l’ampli on a décidé d’utiliser un haut parleur), l’alim, puis l’entrée audio pour le commutateur et les micros ( dans le test on va simplement mettre une prise jack pour le brancher à un téléphone et mettre de la musique).
04/06/2023:¶
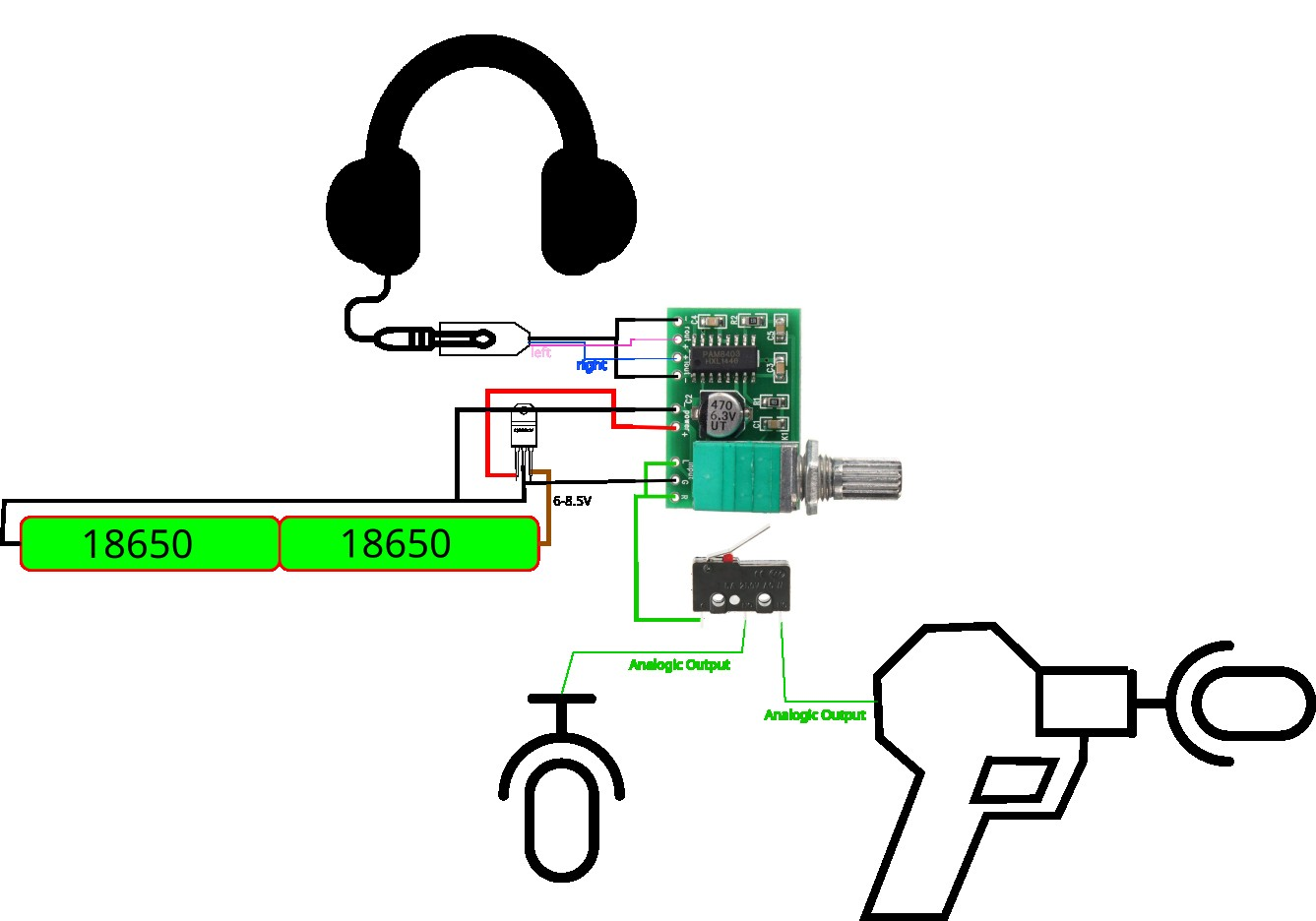
Avant de commencer a souder pour tester l’amplificateur, j’ai eu l’idée de faire un schéma du circuit sur inskcape pour bien savoir les branchements et ne rien oublier :
!
!
Donc une fois cela fait, j’ai donc dessoudé l’ampli au lecteur MP3 auquel il était rattaché, j’ai choisi un haut parleur dans le fablab, et un câble jack.
J’ai donc ensuite commencé a souder en premier le haut parleur :
!
!
J’ai donc rajouté des fils sur le haut parleur (rouge pour le + et noir pour le -) puis je l’ai soudé à la sortie de l’amplificateur aux + et – respectifs.
06/06/2023:¶
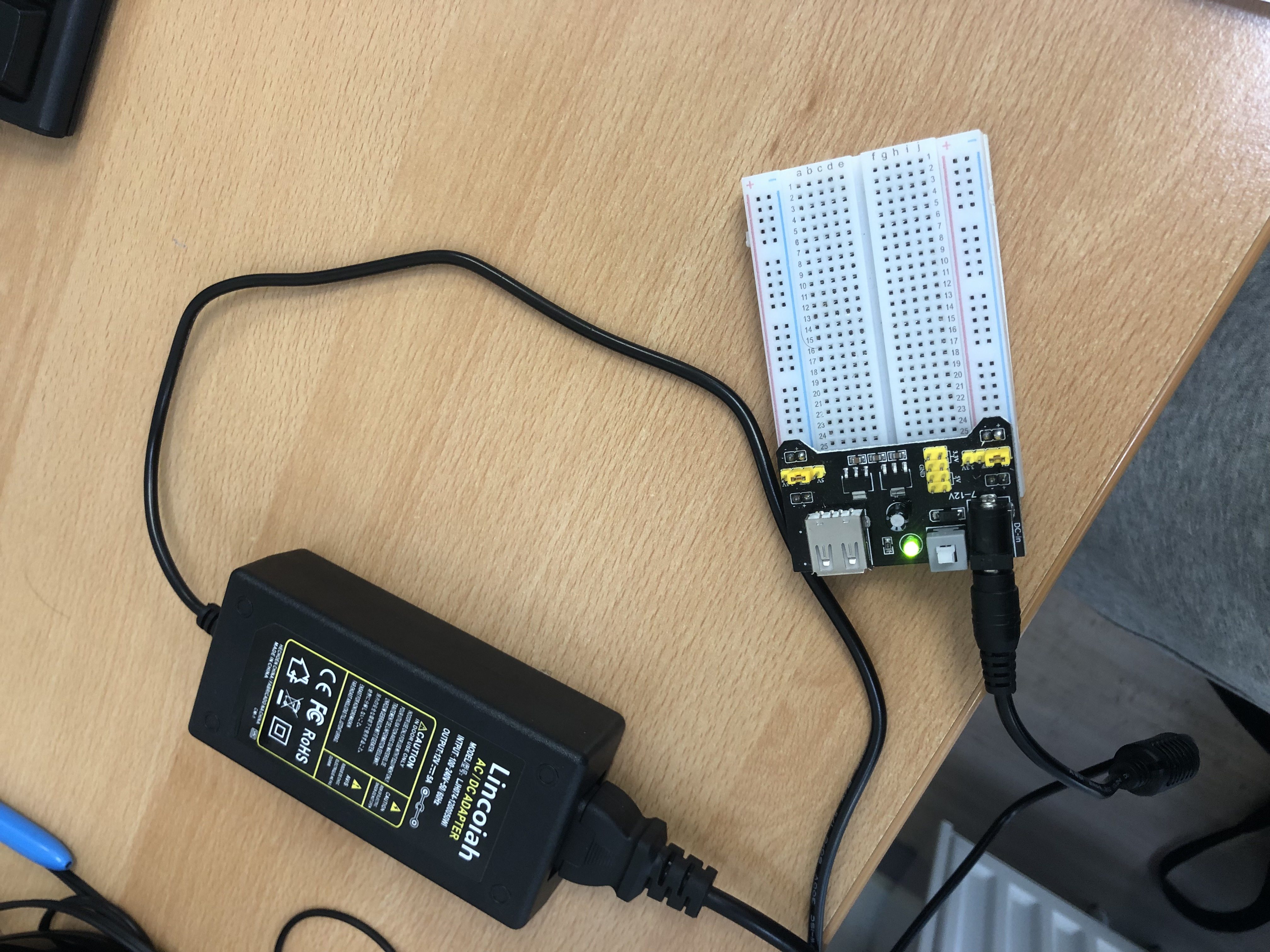
Ensuite concernant l’alimentation, comme nous allons utiliser un module 6-12V à l’aide d’une plaquette de prototypage, j’ai donc soudé 2 pins sur l’alimentation de l’amplificateur :
!
!
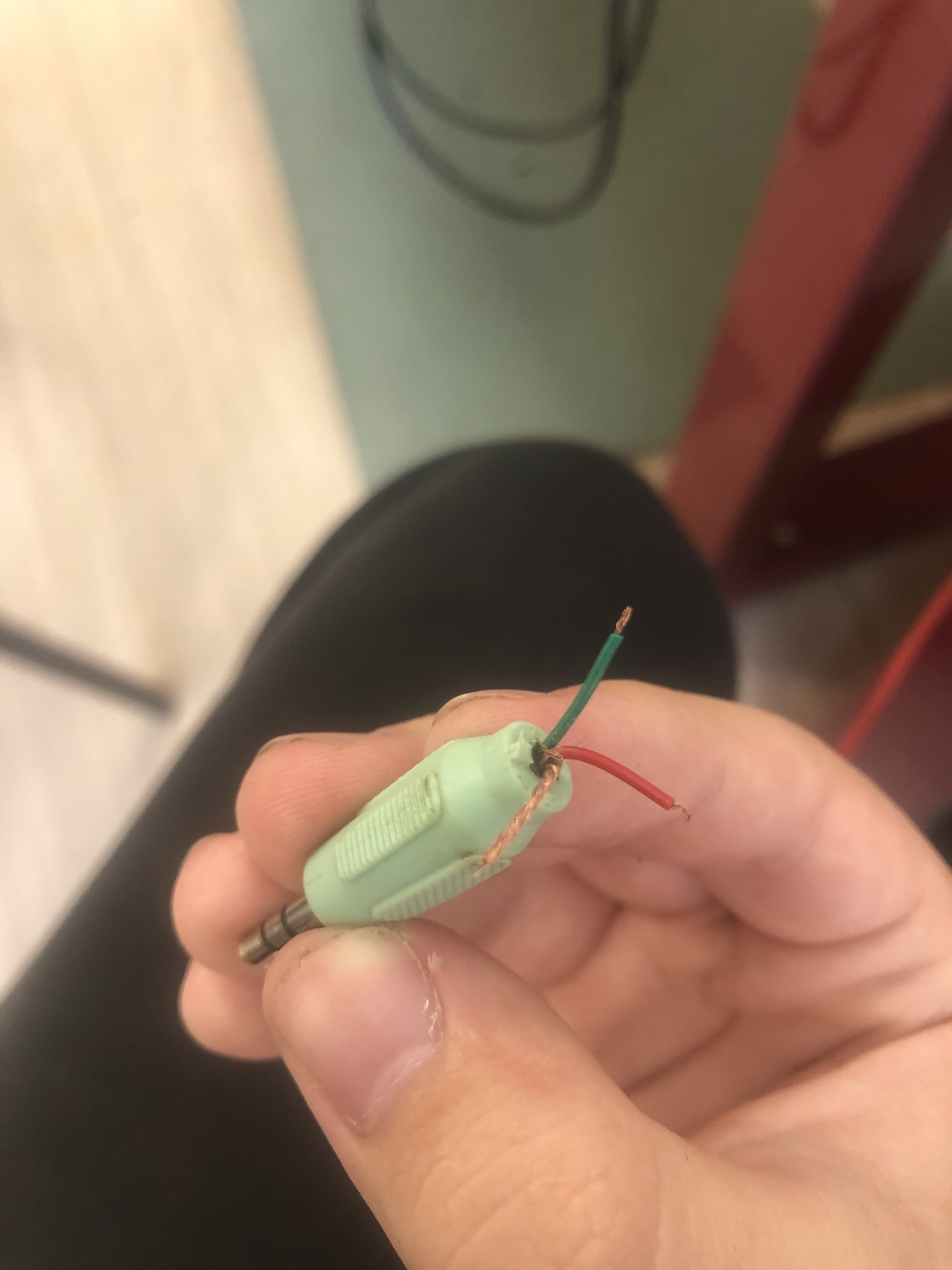
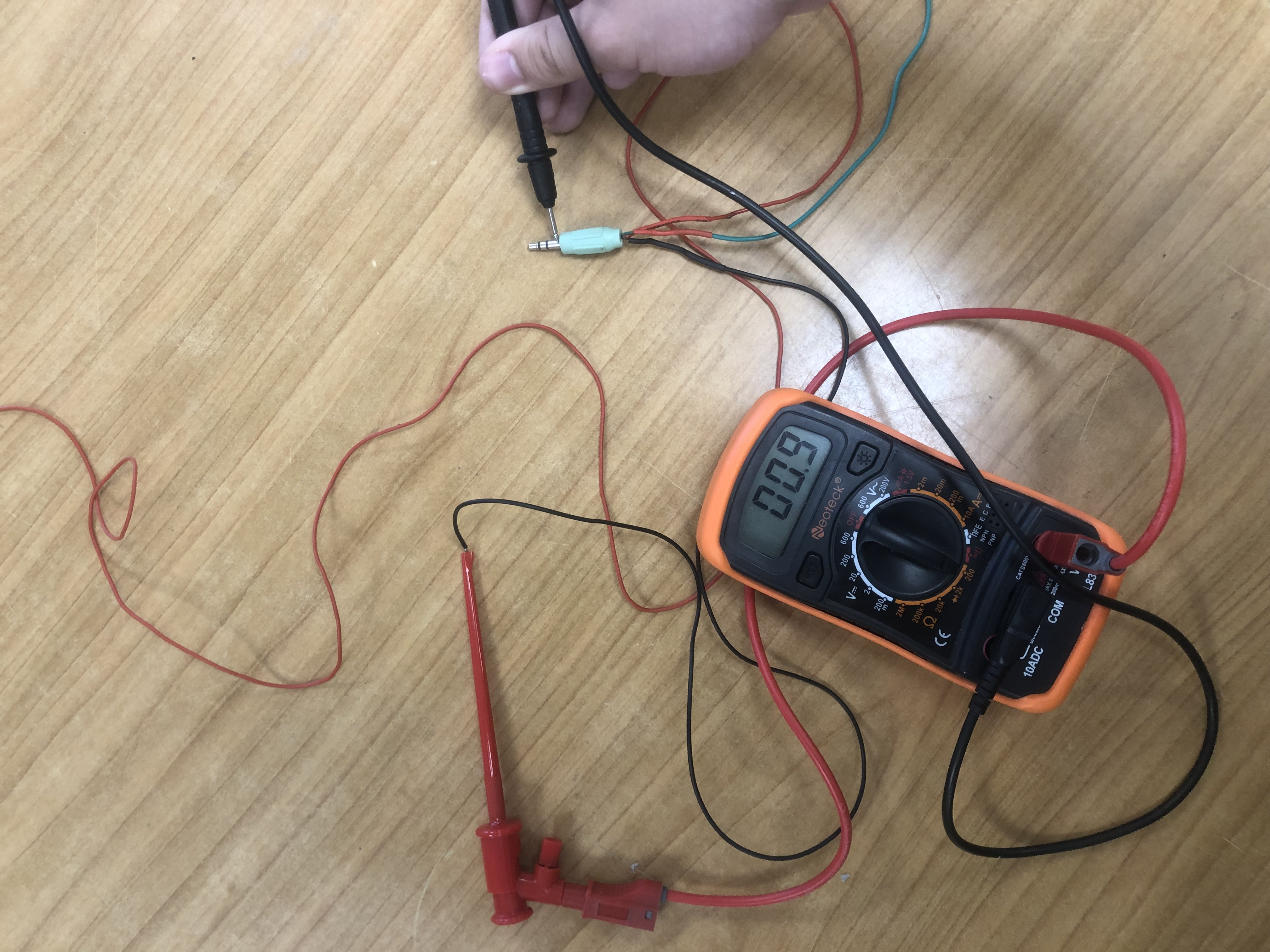
Ensuite il me restait donc plus qu’à souder le câble jack avant de pouvoir tester l’ampli, avant de le souder je voulais et j’ai finalement bien fait de le faire, vérifier que le câble n’avait pas de faux contact au niveau du GND, du left ou du right. En vérifiant donc avec le multimètre , pour le GND tout était ok mais pour les deux autres, il y avait bien un faux contact, j’ai donc coupé le câble en 2 puis en 4 mais il y avait toujours ce faux contact. Au final le faux contact était au départ du fil en lui même, j’ai donc du couper l’entièreté du câble :
!
!
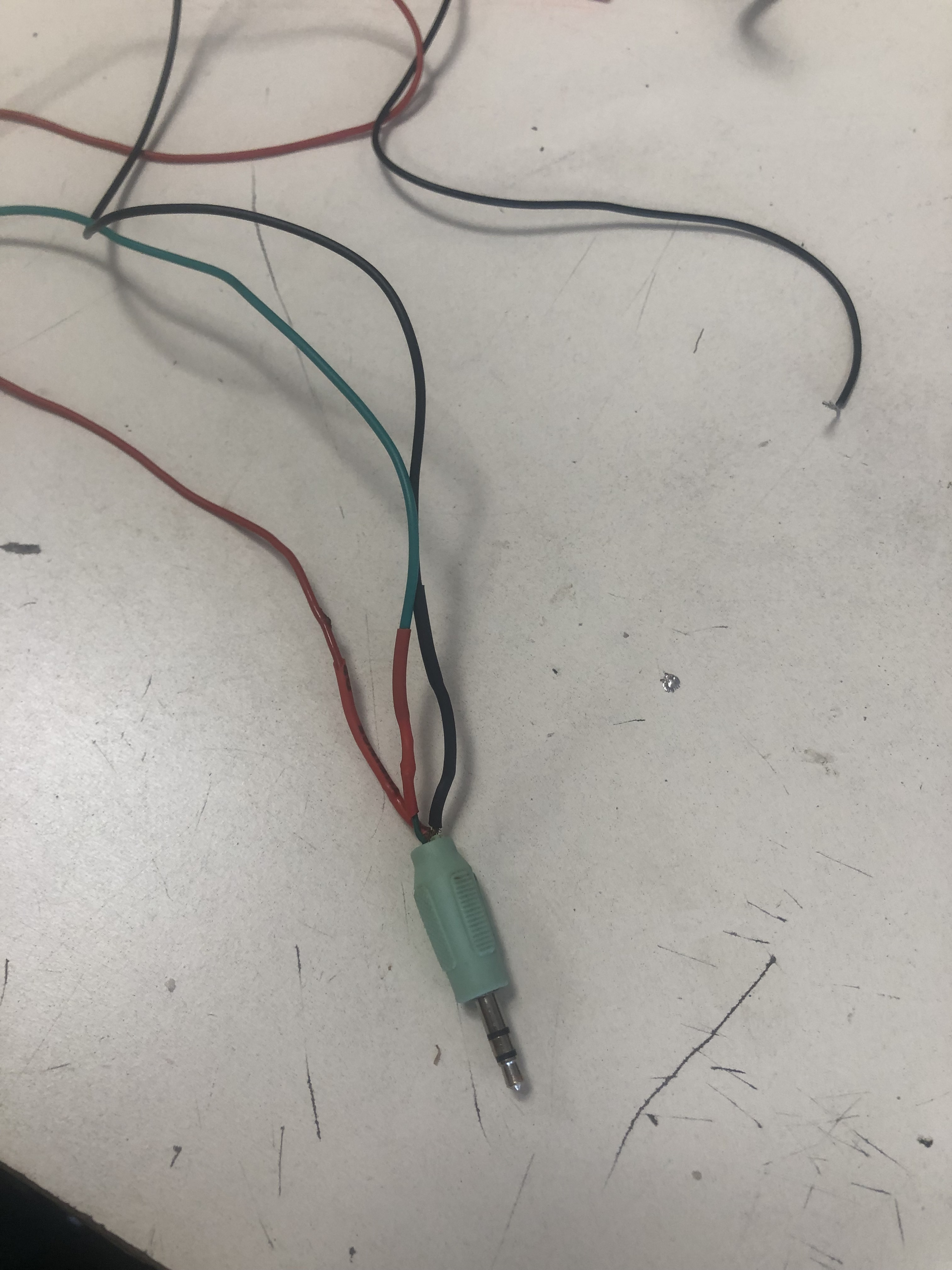
Sauf que bien évidemment, le câble était maintenant trop court pour pouvoir le souder et l’utiliser, j’ai donc du le « réparer » , j’ai donc rajouté un câble pris dans la réserve que j’ai rajouté à celui ci en les soudant entre eux, puis j’ai coupé un bout de gaine thermorétractable de la longueur de soudure entre les deux câbles puis à l’aide d’un fer a air chaud, j’ai donc rétracté la gaine thermorétractable, et j’ai répété cette action pour les 3 câbles du jack :
!
!
Une fois le câble réparé j’ai donc du bien vérifier qu’il marchait, que les soudures tenaient etc. J’ai donc encore une fois utilisé le multimètre pour vérifier la continuité :
!
!
Et donc comme testé sur la photo, le test de continuité était validé pour les 3 câbles, le câble était donc réparé et fonctionnel.
Il ne me restait plus qu’a le souder aux entrées Left ground et right de l’amplificateur, cependant comme nous avons utilisé qu’un seul haut parleur sur 2, nous étions donc en mono et non en stéréo, donc pour souder l’amplificateur il fallait le souder sur GND bien sûr et comme le haut parleur était soudé a la sortie gauche,donc j’ai soudé le jack seulement sur Left.
08/06/2023:¶
Maintenant il était temps de tester le montage, j’ai donc d’abord placé le module d’alimentation sur la plaquette de prototypage en l’ayant mis sous secteur :
!
!
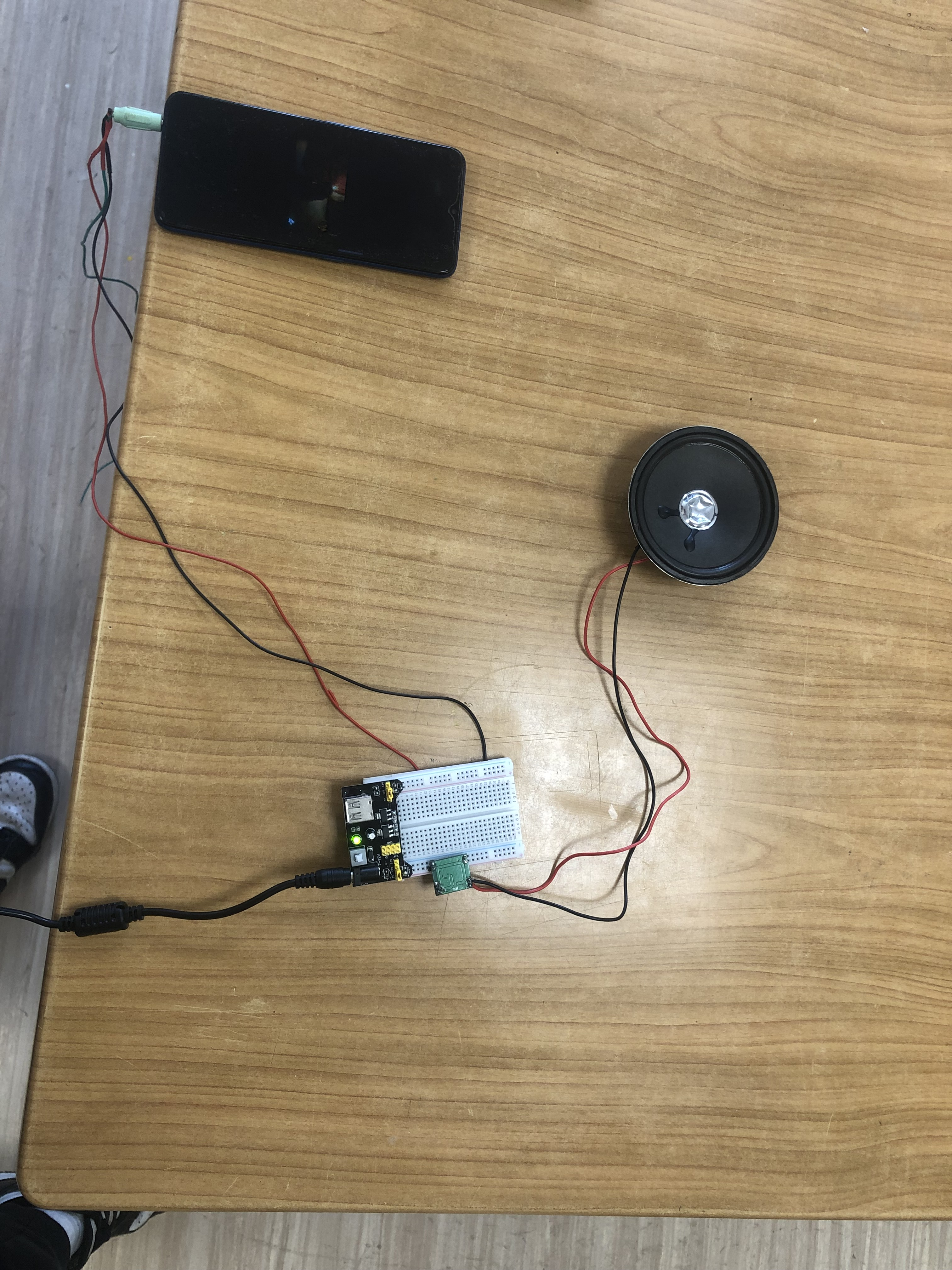
Il me restait plus qu’à placer les pins d’alimentation de l’amplificateur sur la ligne 5V du module 6-12V, et brancher le jack sur le téléphone et mettre une musique par exemple :
!
!
Une fois le montage testé, le son de la musique était bien amplifié et cela marchait donc très bien.
Mais il y avait un problème que j’avais oublié, le volume plus ou moins fort de l’amplification était donc géré par le téléphone en augmentant ou baissant le volume, cependant sur le projet en lui même ce seront les micros à la place du téléphone et donc on ne pourra pas gérer le niveau d’amplification souhaité, j’ai donc cherché des modules d’amplification ( le même que ici soit le PAM8403 comme il marchait) mais avec un potentiomètre rajouté et j’ai donc trouvé : [[https://www.amazon.fr/pi%C3%A8ces-PAM8403-st%C3%A9r%C3%A9o-Amplificateur-num%C3%A9rique-digital/dp/B073VKWRJD/ref=sr_1_6?keywords=pam8403&qid=1686300311&s=electronics&sr=1-6]]
10/06/2023:¶
Aujourd'hui j’ai donc commencé sur Inkscape, le schéma avec les micros et le commutateur afin de tester ce prototype :
!
!
Dans ce montage, le son sera donc en mono c’est pour cela que il y a que un seul haut parleur que j’ai décidé de mettre à gauche et que dans les entrées le commutateur est donc seulement relié a la broche left (gauche) de l’amplificateur.Une fois cela fait, nous avons fais le montage mais on s'est rendu compte que le haut parleur ne ressortait aucun son d'un des deux micros, pour vérifier que cela ne venait pas du commutateur ou des micros, on a donc effectué le test avec un oscilloscope, et avec ce test on a bien vu que les micros émettaient un signal, et que lorsqu'on appuyer sur le commutateur, le signal changeait ce qui montre le passage d'une voie 1 a à la voie 2 donc on s'est dit que cela venait du fait que les micros devaient être amplifié au préalable avant .
12/06/2023:¶
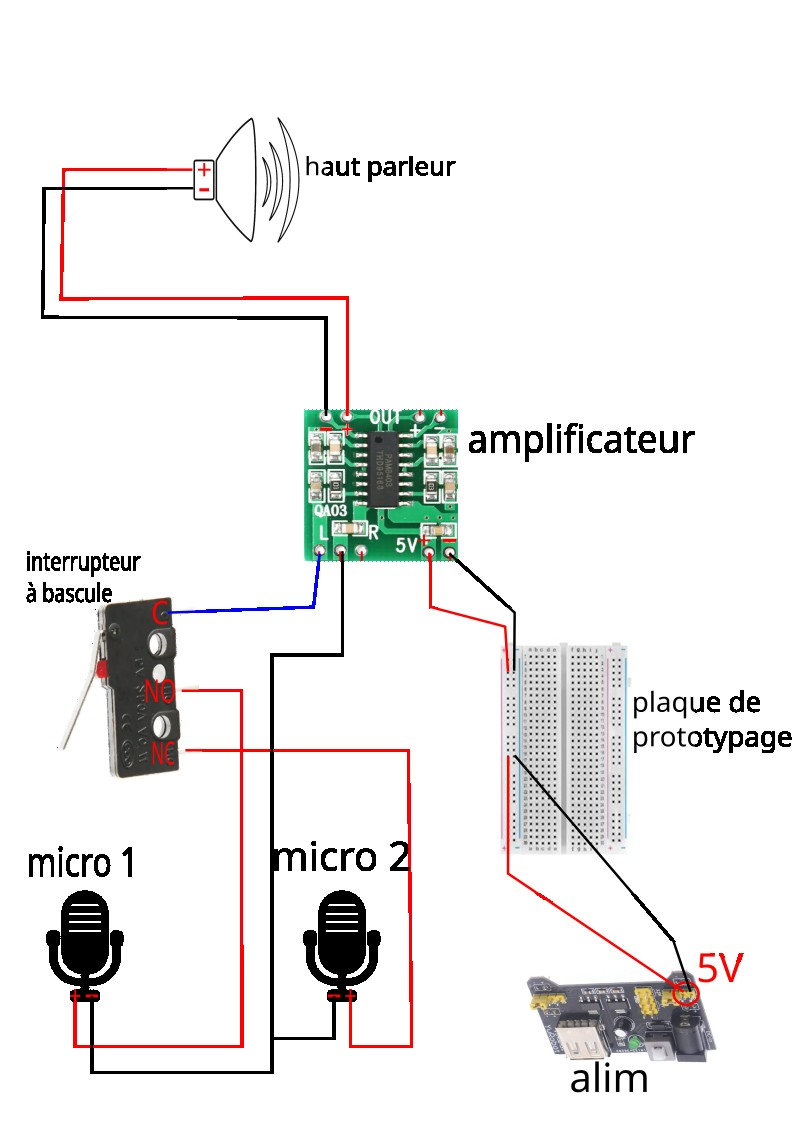
Une fois cela fait, avec Pierre nous avons fais , toujours sur Inkscape, un montage du projet global avec tous les éléments et composants nécessaire à ce dernier :
!
!
Ensuite, j'ai pensé que souder les composants directement sur l'amplificateur n'était pas la solution optimale car pour des test, c'était un peu embêtant de souder puis dessouder à chaque fois et donc j'ai installé des pins sur l'amplificateur, et a chaque câble j'ai rajouté, toujours avec gaine thermo etc, des duponts mâles et femmelles afin de juste les brancher a l'amplificateur effectuer les tests puis les enlever pour faire d'autres test sans à chaque fois déssouder:

14/06/2023:¶
Aujourd'hui j'ai laissé mon camarade sur les test des micros etc et de mon côté avec l'accord de pierre et de l'équipe je suis parti sur un projet personnel pour faire moi même mon papercraft.
Mon objectif était le suivant, modélisé moi même quelque chose sur un logiciel de modélisation 3D tel que blender, l'envoyer en svg (format 2d) sur mon logiciel de papercraft qui est pepakura, imprimer les patrons avec la découpe laser du fablab puis le fabriquer, sans prendre un fichier déjà fait sur internet ou autre.
Pour commencer je me suis donc d'abord consacré sur la modélisation 3D, tutos aides, raccourcis clavier etc... Une fois cela fait je me suis demandé ce que je pouvais modélisé et qui aurait un lien avec le concept du fablab, j'ai d'abord pensé à une fusée ou un robot. Je suis donc parti sur une fusée, et ayant vu un tuto pour savoir modélisé à partir d'un modèle 2D, j'ai donc recherché des fusée 2D sur internet et j'ai trouvé cela : [[https://www.behance.net/gallery/18773017/Low-poly-Rocket]]
Je me suis donc mis à la modélisation 3D en essayant ce modèle, c'était plutôt pour me familiariser avec blender que pour le modèle en soit, une fois essayé je suis donc arrivé a ce résultat :.png)
*16/06/2023:¶
Aujourd'hui j'ai donc continué mon projet, et après réflexion du projet 3D, je me suis rendu compte que ce modèle 3D allait être compliqué à faire en tant que papercraft car papercraft dit papier cartonné donc des pièces qui s'assemblent de manière linéaire et simple, déjà que j'avais le doute sur le fait de la propulsion , car le papier n'allait pas tenir en équilibre, mais pour la fumée, cela n'était pas du tout linéaire donc impossible de les assembler entre eux. Donc j'ai laissé tombé ce projet mais cela m'a permis malgrès tout de bien commencer à maitriser blender. Je suis donc parti sur une de mes idée de départ qui est donc un robot.
Un robot me semblait être une bonne idée car un robot peut être facilement linéaire à base de carrés, rectangle, triangle etc et j'ai donc commencé a modelisé, encore avec des tutos des aides, des exemples etc.
A la fin de la journée je suis donc arrivé à un résultat très satisfaisant pour ma part :
.png)
*18/06/2023:¶
Une fois donc que j'avais modélisé ce que je voulais, je savais que cela était parfait pour un papercraft, je l'ai donc exporté en svg puis envoyer sur pepakura, ce logiciel pepakura, me permet déjà de mettre les textures tel que je les veux pour les couleurs etc, je pouvais le faire sur blender mais cela était plus pratique sur pepakura, et avec pepakura, cela m'aide a mettre ce modèle 3D en 2D sous forme de patrons que je peux imprimer et puis le logiciel m'aide ensuite a savoir quel pièce se colle ou etc..
Ayant le modèle sur pepakura j'ai donc essayé plusieurs type de modèle, j'ai d'abord regarder les feuilles cartonnées qui étaient disponible au fablab puis j'ai essayé plusieurs modèle pour savoir celui que je préférais, et j'ai donc opté pour celui ci :
.png)
Une fois le modèle exporté sur pepakura, les couleurs choisis, il me restait plus qu'a le mettre en 2D sous forme de patrons sur inskcape, et surtout avec les couleurs séparés entre eux sur des feuilles différentes ( pour la découpe laser ) :
.png)
.png) *
*
Comme vous le voyer sur la photo il a seulement des traits rouge et vert, cela est pour l'imprimante laser, afin de marquer par des traits RGB, si il faut découper ou graver ou autre, j'ai choisi la couleur rouge pour indiquer à l'imprimante de couper, et les traits verts pour indiquer de couper aussi mais à un degrès moins fort pour que cela les marque et plie seulement sans les couper.
*20/06/2023:¶
Une fois exporté sous forme de patron en 2D etc, il était temps de découper a la laser, ne l'ayant jamais utilisé auparavant, j'ai donc demandé à catherine, une adhérente récurente du fablab de m'aider et de m'expliquer son fonctionnement, une fois qu'elle m'a expliqué et que j'ai pu bien comprendre, j'ai du faire des tests avant la vrai découpe pour savoir quel degrés de découpe mettre pour savoir quel rendu me convenait le plus, ensuite j'ai donc commencé les vrais découpes avec les bonnes feuilles et les réglages que je voulais :
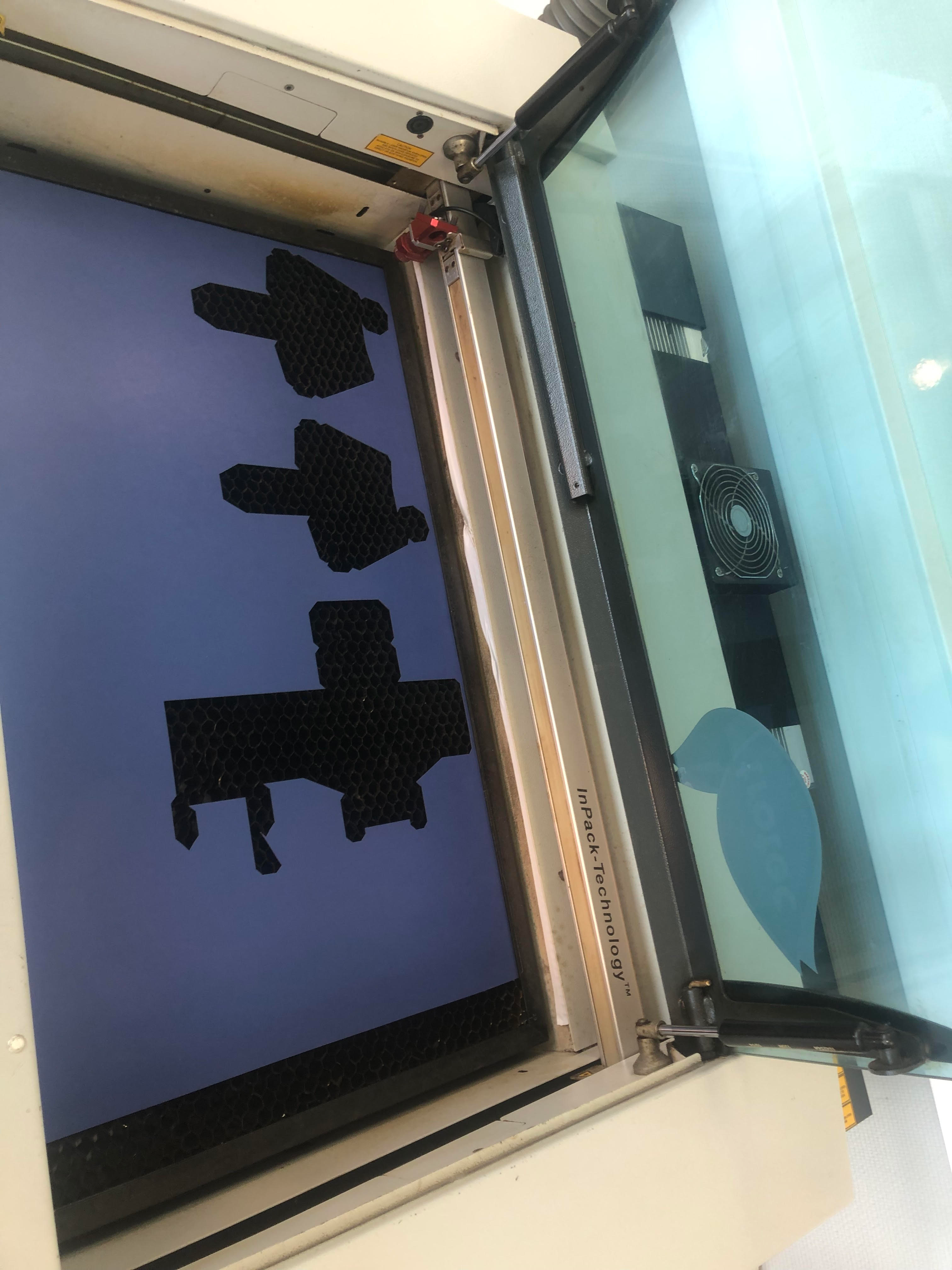
Très content du rendu et de la marque de plis, j'avais maintenant toutes les pièces nécessaire à la fabrication du robot.
*22/06/2023:¶
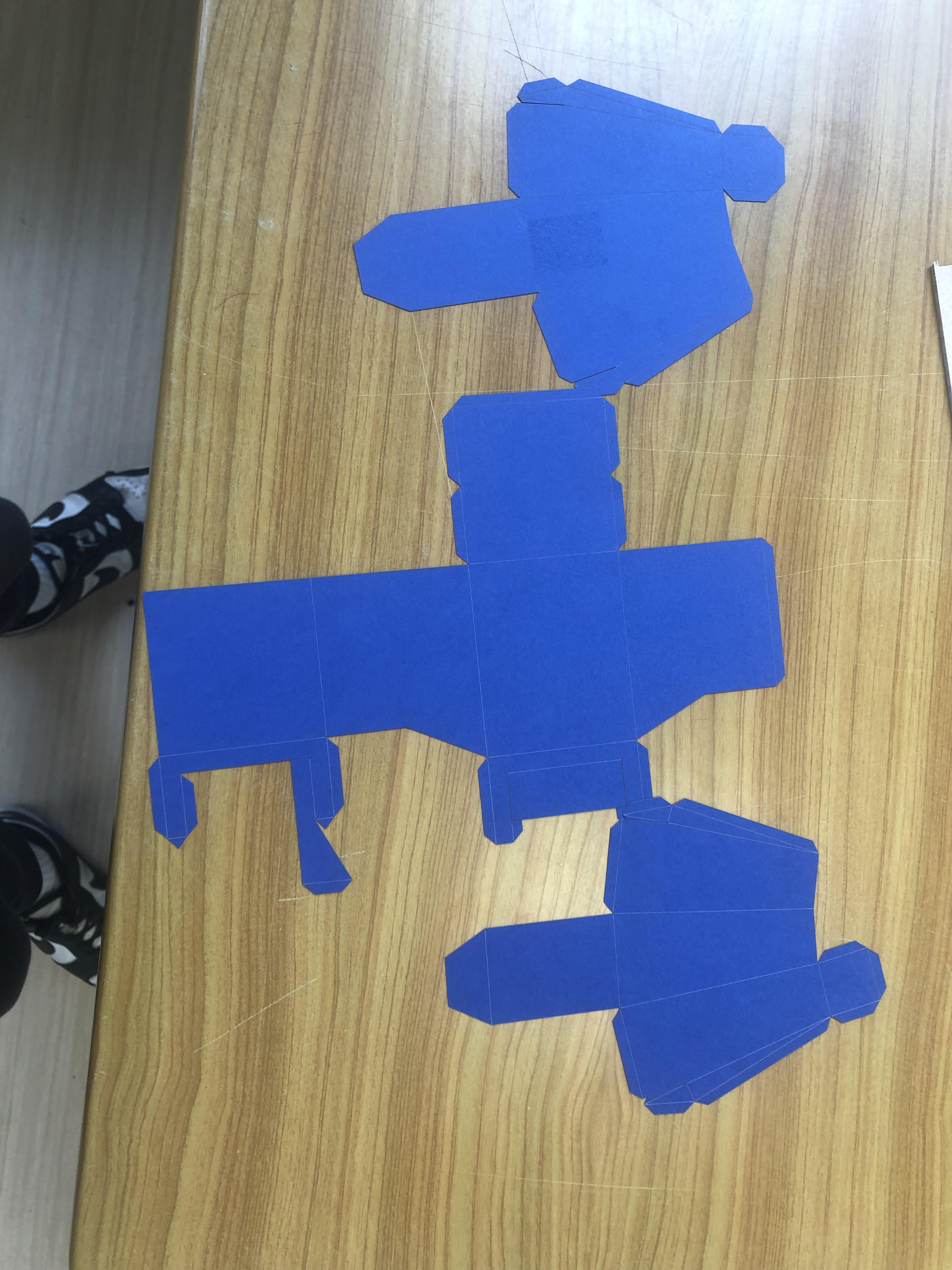
Ensuite, une fois toute les pièces découpés et marqués, il me restait plus qu'a les plier et les assembler entre eux en suivant pepakura, comme vous le voyer ci dessous si je reste sur une languette d'un des patrons cela m'affiche directement ou elle se colle etc :
.png)
J'ai donc commencé à assembler les pièces en commençant par les pieds et les articulations vers le corps : 
Puis j'ai fais les bras à part :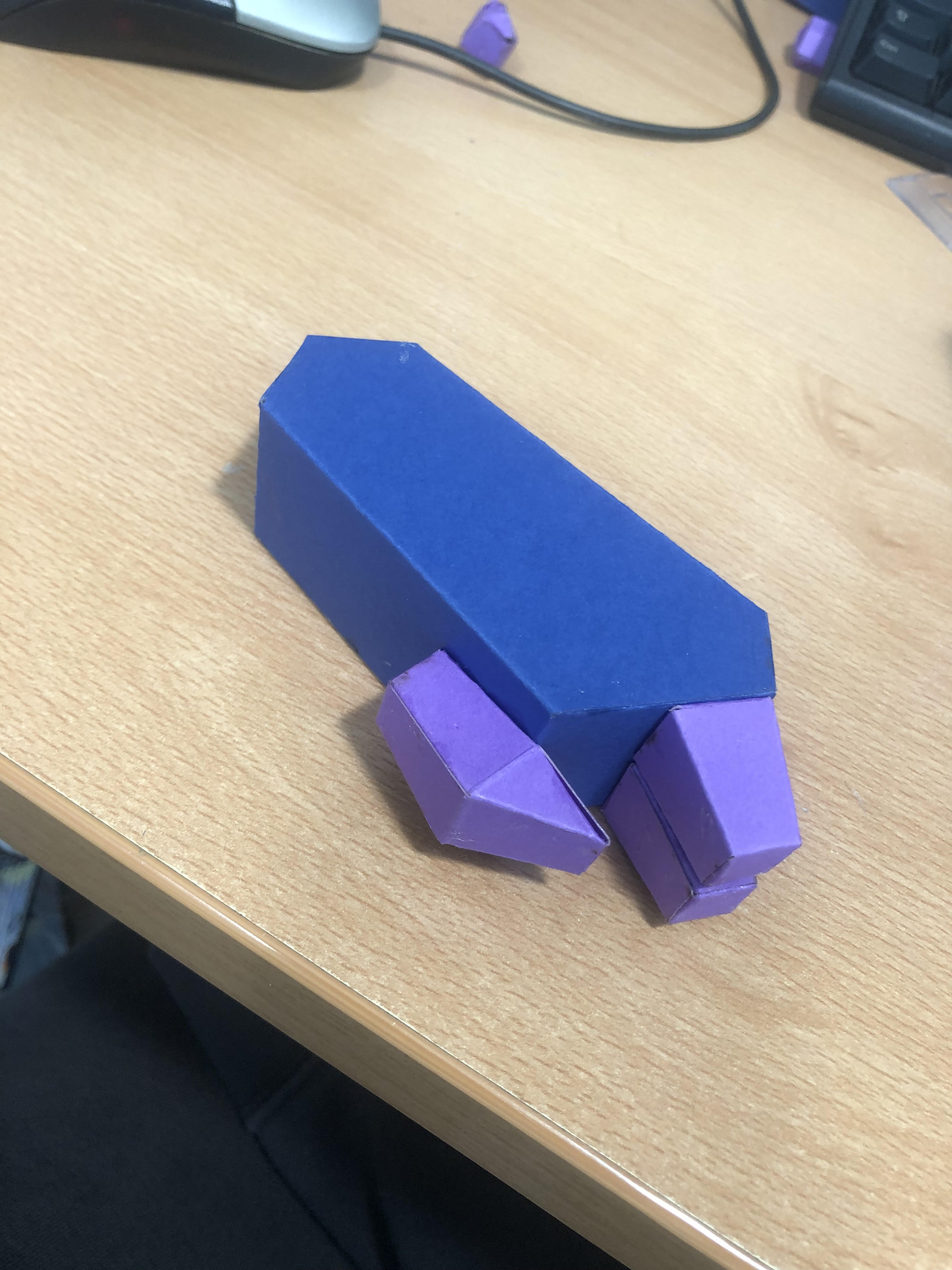
24/06/2023:¶
J'ai donc continué à assembler le robot, j'ai rajouté le corps, les bras ainsi que les doigts aux jambes déjà faites :

Puis il ne me restait plus qu'à rajouter la tête ainsi que les "ailes" dans le dos pour aboutir a la finalité de ce robot :