Yannick Cormann¶
ce que j'ai fait jusqu'à présent dans mon école : l'Institut Robert Schuman à Eupen¶
Cahier des charges Quali Yannick Cormann
Pour mon travail de fin d'études, je prévois de développer un clapier à lapins automatisé afin d'aider ma grand-mère à s'occuper de son lapin tout en lui permettant d'avoir plus de plaisir à élever des lapins. Mon objectif n'est pas seulement de faciliter les soins quotidiens, mais aussi d'aider d'autres amateurs de lapins qui recherchent à faciliter les soins pour leurs animaux.
Pour garantir la sécurité, j'utiliserai des boîtes de dérivation et j'installerai tous les câblages à l'extérieur du clapier.
Les composants essentiels pour ce projet sont les suivants :
Alimentation automatique : le système utilise une horloge en temps réel (RTC) pour contrôler le distributeur de nourriture. Celui-ci distribue deux fois par jour, à midi et l'après-midi, des quantités de nourriture prédéfinies.
Dosage de la nourriture : un moteur pas à pas précis régule les portions de nourriture afin de garantir que le lapin reçoive exactement la quantité dont il a besoin.
Garantir l'accès à l'eau : Le distributeur d'eau garantit un accès continu à l'eau, ce qui est essentiel pour la santé du lapin.
Ouverture et fermeture de la porte : un moteur ouvre la porte, tandis qu'un système de contrepoids ferme la porte le soir en fonction de la présence du lapin. Le calibrage peut être effectué facilement à l'aide d'un bouton.
Surveillance par capteurs à ultrasons : des capteurs à ultrasons surveillent le bon déroulement des mouvements de la porte ainsi que le niveau de nourriture et d'eau afin de s'assurer que toutes les fonctions fonctionnent correctement.
Sécurité de l'enclos : des clôtures protectrices protègent les lapins contre les tentatives d'évasion et les éventuelles rivalités avec d'autres animaux.
Protection lors du creusement : Une protection sous l'enclos permet au lapin de creuser sans former de tunnels de sortie incontrôlés.
Fonction de notification : le système utilise le WIFI pour envoyer des notifications par e-mail en cas de manque de nourriture ou d'eau, ou en cas de problème, comme une porte qui ne se ferme pas correctement.
Autonomie : le système est autonome et peut fonctionner jusqu'à 3 jours sans intervention humaine. De grands réservoirs/récipients permettent de fournir suffisamment de nourriture et d'eau.
stage au fablab¶
mercredi 20 mars¶
Aujourd'hui, j'ai reçu un PC que j'ai un peu personnalisé et j'ai dû me familiariser avec Linux et ce journal de stage.
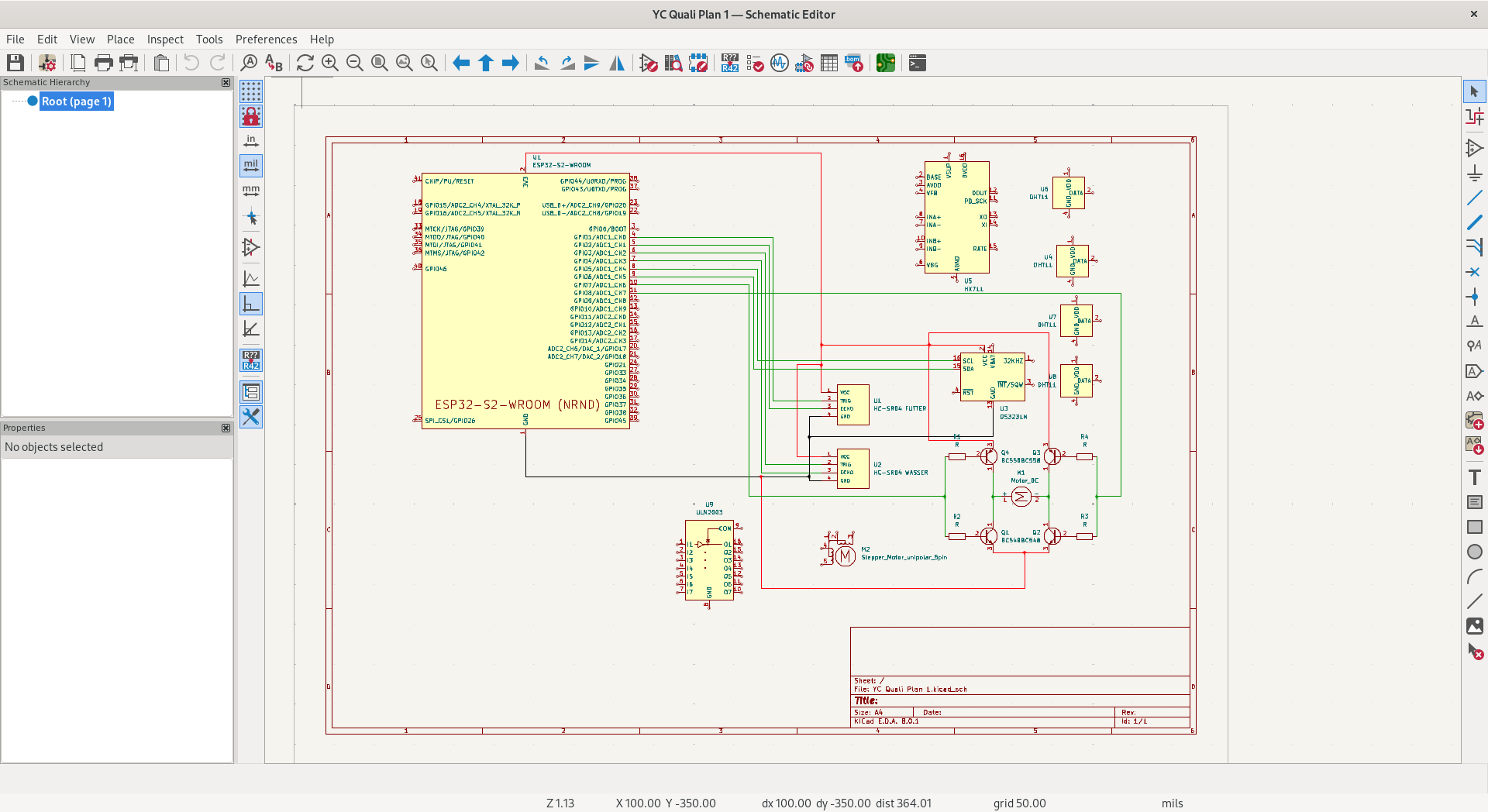
J'ai également fait des recherches pour mieux comprendre le fonctionnement des capteurs et des moteurs que je vais utiliser. J'ai également continué à travailler sur mon plan KiCad, mais il n'est pas encore terminé. Et pour finir, j'ai aussi fait traduire ce texte ici entièrement de l'allemand vers le français, donc si ce n'est pas très bon, je m'en excuse d'avance 
jeudi 21 mars¶
Aujourd'hui, j'ai travaillé à faire fonctionner l'Arduino sous Linux. Grâce à l'aide d'Emil, de Pierre, de Jean-Baptiste et de toute l'équipe du Fablab, cela a plus ou moins fonctionné. J'ai déjà pu travailler un peu sur mon programme et expérimenter avec un moteur pas à pas.
vendredi 22 mars¶
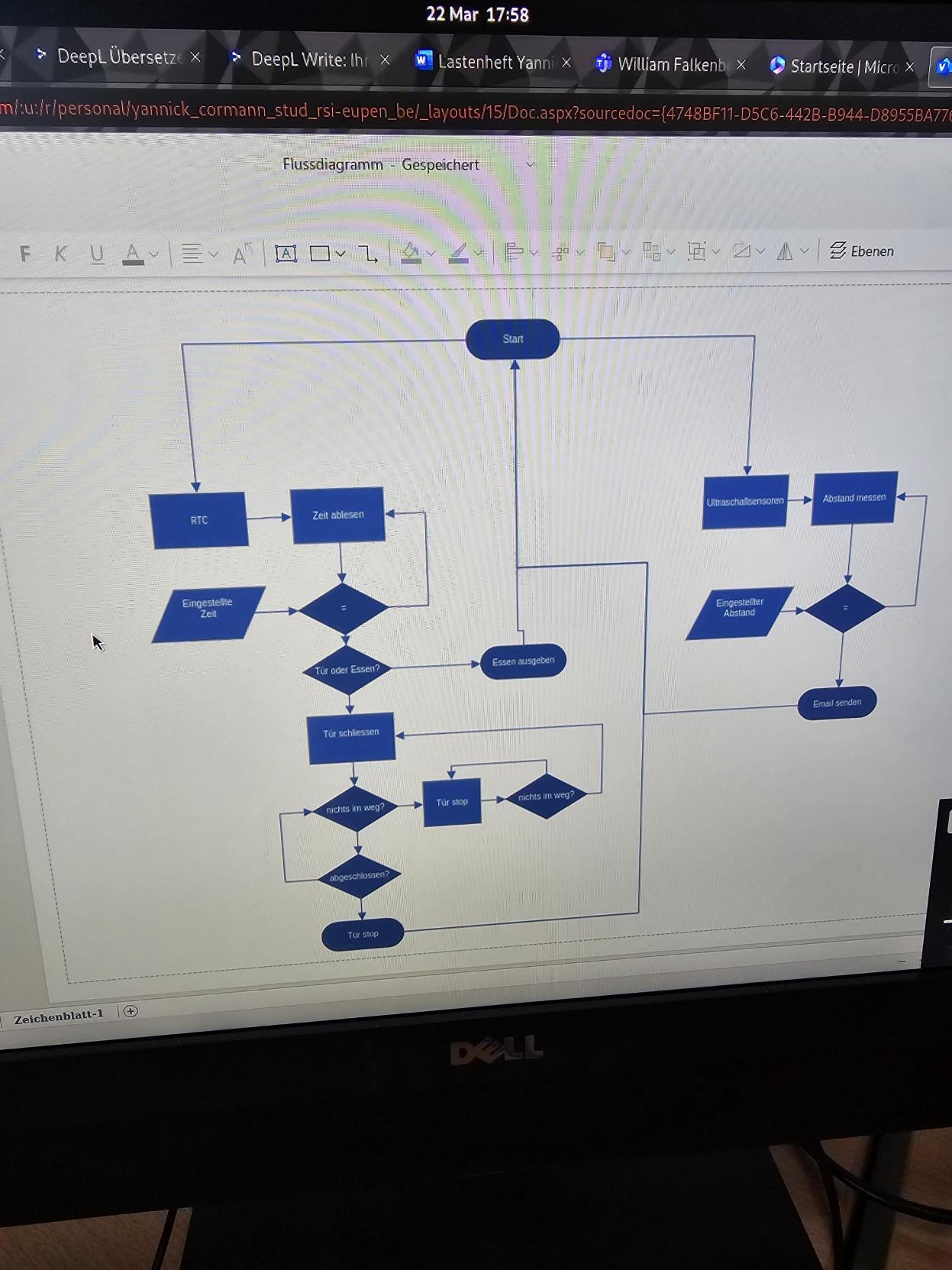
Aujourd'hui, nous avons enfin résolu tous les problèmes liés à l'Arduino en l'installant correctement. Pierre m'a également appris à installer correctement des programmes et à mieux connaître Linux. Jean-Baptiste m'a emmené voir un test de matériaux réalisé par Ethan, qui a imprimé différents plastiques PLA avec une imprimante 3D afin de les comparer. C'était très intéressant et agréable de voir les autres bâtiments. À la fin, j'ai créé et terminé mon organigramme.
on allemand
lundi 25 mars¶
Aujourd'hui, j'ai amélioré et traduit l'organigrAujourd'hui, après un bref bug de connexion (il semble que j'attire les problèmes informatiques comme par magie), j'ai travaillé sur mon dessin 3D pour le distributeur de nourriture, mais je ne suis pas satisfait du résultat actuel. Ce n'est que la première partie de la 'roulette de nourriture'. Demain, je ferai une petite pause pour rédiger la partie écrite de mon travail de qualification. J'espère que je n'aurai pas d'autres problèmes ;)amme. De plus, j'ai enfin trouvé la fonction de capture d'écran sous Linux XD
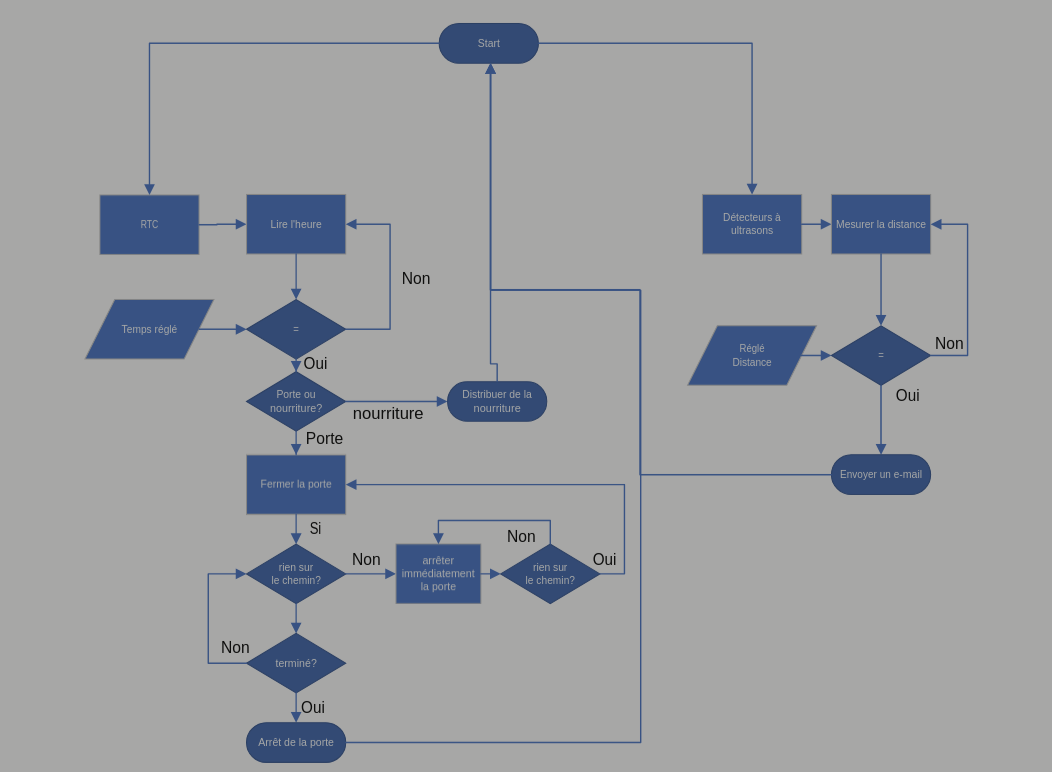
En plus, aujourd'hui, j'ai fait l'organigramme avec Inkscape, parce que Jean-Baptiste me l'a conseillé.
Cela a pris du temps, mais au bout d'un moment, j'ai réussi à quitter le programme et à terminer le fichier. Ensuite, j'ai dû chercher pourquoi le programme Free-Cad se plantait tout simplement après avoir "créé un nouveau fichier". N'y arrivant pas, j'ai demandé de l'aide, que j'ai rapidement obtenue. Grâce à Julien et Emil, cela fonctionne maintenant après 3 installations différentes. 1 : appimage se charge, mais plante immédiatement. 2 : via apt, problèmes à l'ouverture d'un nouveau fichier.
3 : via conda fonctionne bien, mais c'est plus compliqué.
Merci encore à vous les gars et désolé de ne causer que des bugs et de ne pas avoir beaucoup de connaissances sur Linux.
mardi 26 mars¶
Aujourd'hui, après un bref bug de connexion (il semble que j'attire les problèmes informatiques comme par magie), j'ai travaillé sur mon dessin 3D pour le distributeur de nourriture, mais je ne suis pas satisfait du résultat actuel. Ce n'est que la première partie de la 'roulette de nourriture'. Demain, je ferai une petite pause pour rédiger la partie écrite de mon travail de qualification. J'espère que je n'aurai pas d'autres problèmes
.jpeg)
.jpeg)
mercredi 27 mars¶
Aujourd'hui, j'ai terminé avec succès le dessin 3D du distributeur de nourriture, y compris la roue et le boîtier, avec un racloir précis pour les portions. Malgré des défis initiaux, comme les dimensions trop petites des parois de la roue, j'ai réussi à terminer le projet. Il se trouve maintenant à un stade de développement avancé. La fabrication par imprimante 3D aura probablement lieu demain, car aujourd'hui, ce serait trop court
.jpeg)
.jpeg)
.jpeg)
.jpeg)
jeudi 28 mars¶
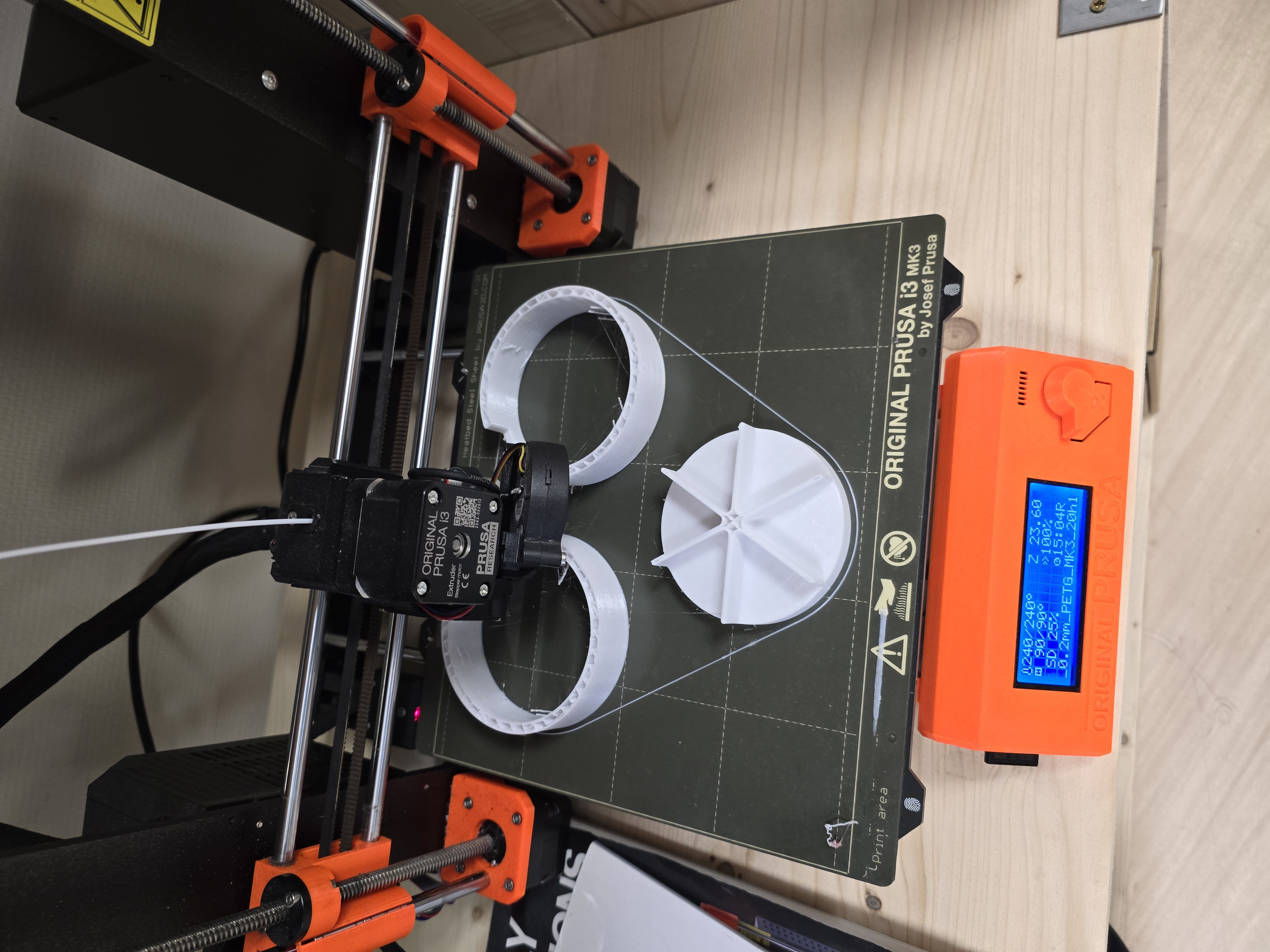
aujourd'hui, j'ai pu commencer à imprimer en 3D de manière détournée. comme mon ordinateur ne voulait pas prendre en charge l'échange de données usb pour une raison quelconque, nous avons décidé d'envoyer cela par e-mail à un autre ordinateur. en outre, j'ai travaillé sur la partie écrite de mon travail de qualification. et j'ai enfin trouvé un moteur 28BYj-48. demain, je commencerai à travailler avec ce moteur.
vendredi 29 mars¶
Aujourd'hui, j'ai sorti l'impression 3d de l'imprimante. j'ai remarqué quelques erreurs et améliorations que j'ai directement corrigées. de plus, je suis parti plus tôt à cause de mon contrat.
mardi 2 avril¶
aujourd'hui, j'ai fait un programme similaire à celui de vendredi. j'ai bien poncé et poli les pièces améliorées. en plus, j'ai fait quelques expériences avec le moteur. demain, j'espère avoir plus de chance et avoir terminé le programme.
mercredi 3 avril¶
aujourd'hui j'ai écrit le programme et il fonctionne. ensuite jean-baptiste m'a donné une idée/entrée pour alimenter le moteur via 12 volts, mais cela ne fonctionne pas car le moteur est limité à 5 volts.
J'ai aussi essayé de transférer le programme sur un esp32, mais cela ne fonctionne pas à cause de problèmes techniques. En outre, j'ai encore un peu optimisé les pièces imprimées en 3D dans Freecad.
jeudi 4 avril¶
c'est le dernier jour ici. j'ai terminé le distributeur de nourriture et je vais maintenant répondre à toutes les questions qui me viennent encore à l'esprit et insérer l'image ici.
Pourquoi ai-je choisi le PETG pour l'impression 3D ? Le PETG est plus résistant que le PLA et il est mieux adapté à l'extérieur, ce dont j'ai besoin puisque j'ai mon écurie à l'extérieur.
.jpeg)
.jpeg)
.jpeg)
Version 1.jpeg)
.jpeg)
.jpeg)
Version 2.jpeg)
Version 1 V.S. Version 2
Si quelqu'un a d'autres questions, il peut m'écrire en anglais à l'adresse suivante : yannick.cormann@stud.rsi-eupen.be . Ne soyez pas timide.