Robot Go West¶
Introduction¶
Le projet GoWest est un projet de fabrication d'un robot qui se déplacerait vers la lumière du soleil en fonction des informations fournies par des plantes posées dessus. J'ai pu travailler sur la partie motorisation du robot.
Conception mécanique¶
La partie motorisation est principalement axée sur la mécanique. Pour ce robot, nous avons opté pour un système modulaire avec des blocs moteur qui peuvent changer de chassis.
Dimensionnement¶
Choix du moteur¶
Différentes technologies de motorisation existent, il a fallu en choisir une :
| Moteur pas à pas | Moteur "brushless" | Moteur à courant continu | |
|---|---|---|---|
| Couple | ++ au ralenti | ++ au démarrage et à haute vitesse | ++ au démarrage |
| Vitesse | Faible à moyenne | Rapide | Faible à moyenne |
| Controle | Facile, impulsions | Voltage: PWM (avec driver) | Voltage: PWM |
| Consommation | Dépend du couple nécessaire (meme à l'arret) | Proportionnelle à la vitesse | Proportionnelle à la vitesse |
| Bruit | ++ | - | + |
| Cout | - | + | - |
Les paramètres à privilégier sont la consommation (Robot sur batteries), le cout et le couple. Il s'agira d'un robot peu rapide mais demandant un couple assez important. Le moteur pas à pas permet un contrôle simple avec des impulsions, le couple est facilment controlable et on peut faire tourner le moteur lentement. De plus, il y a plusieurs moteurs pas à pas en stock au Fablab venant de vieilles imprimantes 3D. Les utiliser permettrait de faire du recyclage plutot que d'acheter des moteurs neufs.
Le moteur utilisé sera donc un 42BYGHW811.
Rapport de réduction¶
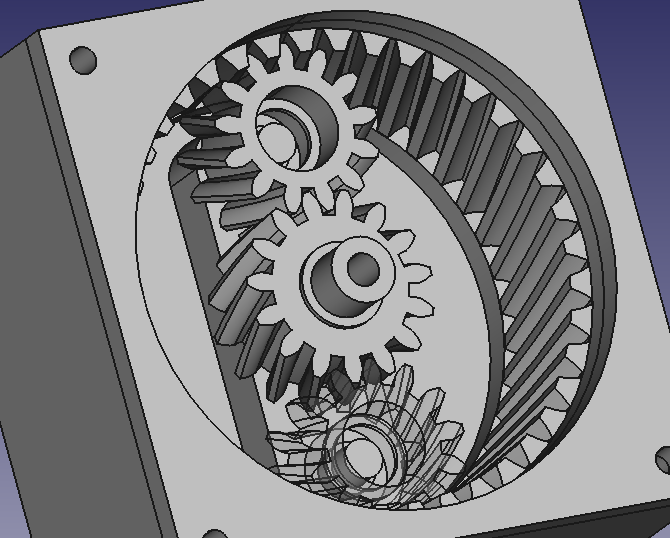
Le moteur pas à pas permet un controle simple de la vitesse et du couple. Cependant, garder un couple élevé même à petite vitesse peut se révéler gourmand en énergie. J'ai donc décidé de dimensionner un réducteur pour diminuer la vitesse tout en augmentant le couple de sortie. Pour un meilleur rapport rapport/encombrement, j'ai opté pour un train épicycloïdal avec comme bati la couronne. Le planétaire est constituée de 15 dents, les satellites de 13 dents et la couronne de 41 dents. Le rapport de réduction est donc de 1 : 3,73.
Le robot fonctionnera sur des chenilles, le diamètre de la roue d'entrainement de la chenille permettra de changer le rapport de réduction également. Plus le diamètre sera petit, plus la force de traction du robot sera importante mais le risque de glissement sera également plus important.
Modélisation¶
Nous allons voir ici la modélisation de la partie motorisation du robot.
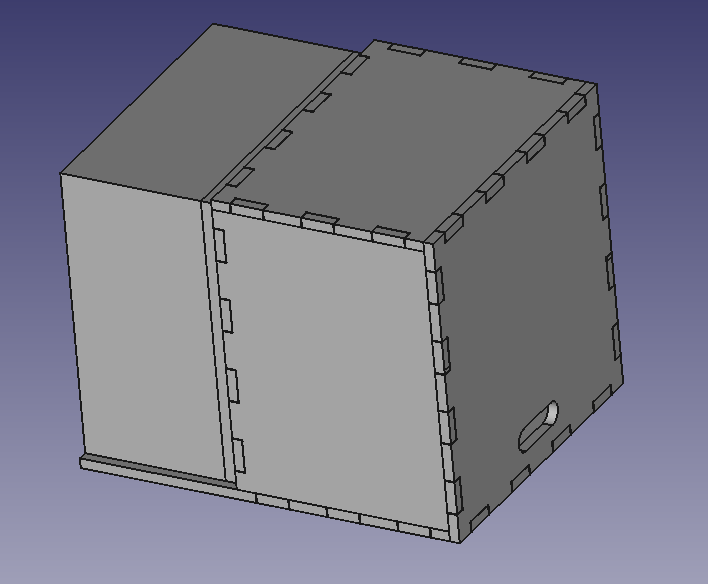
Boitier¶
L'idée est de créer un boitier regroupant le moteur, le driver et le réducteur qu'on pourrait détacher du robot pour le mettre sur un autre châssis. Pour cela le réducteur est fabriqué en 3d le plus compact possible et est attaché au moteur avec des plaques de MDF découpées au laser. Ces plaques devront pouvoir se fixer au châssis à l'aide de vis par exemple. Cette méthode pourrait également permettre de tendre la chenille à l'extérieur pour éviter d'avoir des ressorts à fabriquer.
Réducteur¶
Le réducteur est un train épicycloïdal de type 1 avec un rapport de réduction de 3,7. Pour réduire les bruits les dentures sont obliques avec un angle de 17° (permettant d'avoir un contact constant entre chaque roue). L'arbre moteur entraine le planétaire, et la sortie est le porte-satellites. On utilise ici deux satellites. Le module est de 1,75mm car comme les pièces seront imprimées en PLA il faut un volume minimum de matière pour assurer la qualité de surface ainsi que la solidité.
Le fichier attachment:bloc_moteur.FCStd est sensé etre paramétrique pour pouvoir changer facilement le rapport de réduction.
Support de capteur pour prise de mesure d'éclairement¶
Le fichier freecad <https://git.cohabit.fr/gowest/gowest/src/branch/photosupport/photosupport>