GROUPE : 2 : Sous-marin radiocommandé miniaturisé réalisé par Matteo De Castro et Adam Napias :¶
état du projet : En cours¶
| Sous-marin radiocommandé miniaturisé (Ceci est un prototype conçu par une autre personne, qui nous a servi d'exemple.) |
|---|
| cults3d |
  |
Objectif du projet :¶
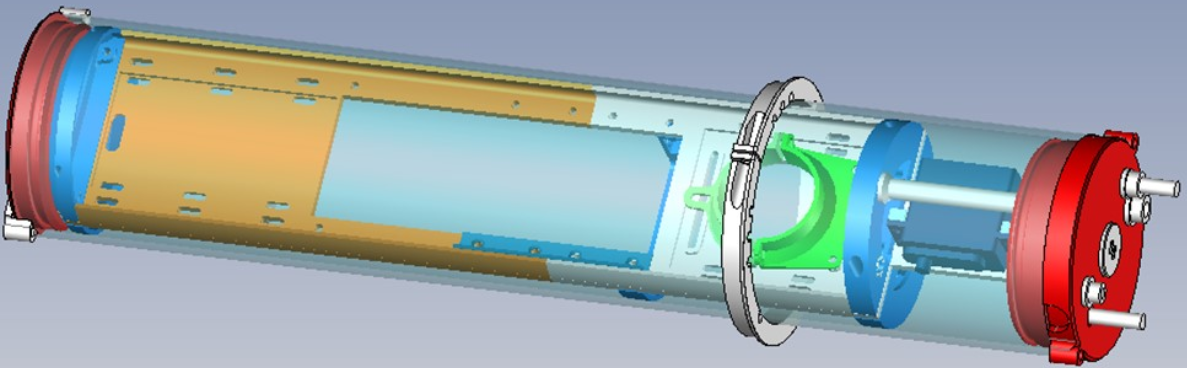
Pour ce projet nous désirons concevoir un sous-marin radiocommandé miniaturisé pouvant être adapté à une multitude d'applications (exploration, modélisme, etc...). Ce sous-marin prendra donc la forme d'un cylindre avec en son sein tous les composants nécessaire à son fonctionnement.
Exigences de conception :¶
- être étanche
- pilotable par une télécommande
- immersion minimale de 2 mètres
- capable d'ajuster sa profondeur
- capable d'avancer, reculer, tourner à gauche, tourner à droite, monter, descendre
Points critiques de conception :¶
- Communication utilisateur ===> sous-marin
- Etanchéité
- Motorisation + Direction
- Système d'immersion
- Alimentation en électricité (en cours)
Avant toute chose :¶
- Dans le but d'avancer dans notre projet, nous nous sommes renseignés auprès de personnes compétentes dans le domaine des véhicules radiocommandés sur le logiciel de messagerie instantanée Discord. Cela nous a permis de recueillir de multiples informations bien utiles (Nous avons par exemple été orientés sur le site ExpressLRS, qui est un protocole de communication).
Lien discord pour poser des questions sur les véhicules radiocommandés :
discord rctestflight
Lien discord en vue de poser des questions sur le contrôle par radio sur un véhicule miniature :
discord expresslrs
Lien pour se renseigner sur comment configurer la télécommande et le récepteur de véhicule radiocommandé :
www.expresslrs.org
Nos professeurs nous ont également orienté vers un membre du Fablab ayant lui-même été un ancien militaire travaillant dans des sous-marins à taille réelle. Malheureusement, nous n'avons pas encore eu le temps d'interagir avec ce dernier. Néanmoins, cela se fera sûrement dans le futur puisque nos professeurs nous ont délégué son mail.
I/ Communication utilisateur ===> sous-marin :¶
-Il est important de savoir qu'il nous est impossible de transmettre avec efficacité un signal radio dans l'eau. En effet, l'eau dégrade grandement tout signal radio. Afin d'y remédier nous déportons le récepteur radio sur un flotteur à la surface de l'eau. Ce récepteur transmettra les ordres au sous-marin par un câble d'une longueur minimale de 2 mètres.| exemple |
|---|
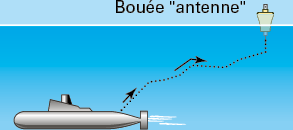 |
a) Réception et émission du signal radio :¶
Pour sélectionner un récepteur et un émetteur adéquat, il faut impérativement connaitre :
-le protocole de communication,
-la fréquence la plus appropriée à utiliser,
-le nombre d'actions (channel) que le véhicule effectuera.
| Protocole de communication | Fréquence | Nombre d'actions |
|---|---|---|
| Expresslrs | 2,4GHz | 6 |
| Récepteur | Signal en sortie |
|---|---|
| EXPRESSLRS 2.4GHZ PWM RECEIVER, R24-P6 | PWM |
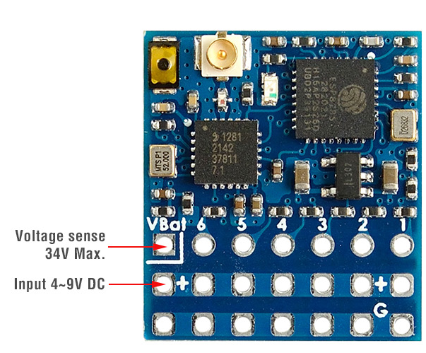 |
b) Transmission du signal PWM au sous-marin :¶
-Afin de contrôler notre sous-marin, nous avons besoin de 6 canaux dans le but d'effectuer 6 actions (avancer, reculer, tourner à gauche, tourner à droite, monter, descendre). Etant donné qu'il nous faut 3 conducteurs pour transmettre une seule action, nous avons donc besoin de 18 conducteurs en tout. Cependant, il est impossible pour le sous-marin d'effectuer 2 actions opposées simultanément (exemple : Le sous-marin ne peut pas avancer et reculer de façon simultanée.). Cela signifie qu'il est possible de faire transiter 2 actions sur un regroupement de 3 conducteurs, cela nous amène donc à 9 conducteurs placés dans une gaine. Le câble qui lie le flotteur au sous-marin est un câble que nous allons nous-mêmes élaborer.
| conducteurs utilisé |
 |
c) Traitement du signal PWM :¶
En lui-même le signal PWM ne peux pas être utilisé pour contrôler directement un moteur. En effet, son signal doit être traité et interprété par un microcontrôleur. Pour pallier à ce problème nous utiliserons l'élément électronique ESC (electronic speed controleur) sur les 3 moteurs brushless.
| ESC servant d'exemple |
|---|
 |
II/ Etanchéité¶
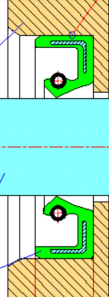
1er : Etant donné que l'arbre est une pièce en rotation, il en devient assez difficile de le rendre étanche. Aussi, nous nous sommes penchés sur l'idée d'utiliser des joints à lèvres en vue de résoudre ce problème. Dans notre cas la lèvre est tournée vers l'extérieure plus précisément vers l'eau (l'exemple même ci dessous) qui exerce une pression sur les joints. Plus la pression de l'eau est importante, plus elle va écrasée le joint sur l'arbre et donc plus la jonction entre les 2 sera étanche.
| exemple joint à lèvre |
|---|
 |
III/ Motorisation + Direction :¶
a) Motorisation :¶
Comme nous utilisons des ESC. Nous allons utiliser 3 moteurs brushless :
-Le premier permettra de propulser le sous-marin,
-le deuxième servira à le faire tourner,
-le dernier moteur sera dévoué à ajuster la plongée du sous-marin.
b) Direction :¶
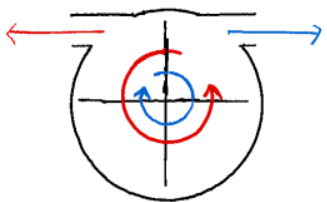
Nous pensons utiliser une turbine en vue de diriger le sous-marin. Pour ce faire un moteur entraînera la turbine (soit dans le sens des aiguilles d'une montre, soit dans le sens inverse). En fonction du sens de rotation, cette dernière éjectera un jet d'eau soit vers la gauche, soit vers la droite de manière à faire tourner le sous-marin à bâbord (côté gauche) ou à tribord (côté droit).| Turbine élaborée par nous-mêmes |
|---|
 |
{kind=link}
IV) Système d'immersion :¶
Comme système d'immersion, nous avons opté pour l'utilisation d'un ballast (dans notre cas, ce ballast est une poche en plastique très étanche de 3 litres). Ce dernier se remplira d'eau à l'aide d'une pompe à eau (élaborée par nous-mêmes) fonctionnant par l'intermédiaire d'un moteur brushless.
| Ballast (poche plastique étanche de 3 litres) |
|---|
 |
V) Alimentation en électricité :¶
Etant donné que nous n'avons pas encore décidé précisément quels types de moteurs utiliser, nous ignorons quel est le modèle de batterie suffisamment approprié afin de faire fonctionner ces derniers. Cela fait donc parti de notre travail de recherche en cours.
Travail restant :¶
- Définir l'étanchéité du boîtier,
- modéliser en CAO (conception assistée par ordinateur exemple : FreeCAD) le sous-marin,
- choisir les moteurs brushless ainsi que la batterie adaptée,
- choisir les ESC,
- modéliser la pompe à eau en CAO,
- choisir le matériel adéquat pour la construction (exemple : tube en PVC).