Gowest-light¶
voir ticket #496 +
I) Cahier des charges¶
Nous essayons d'apporter de l’aide pour continuer le projet communication racinaire qui consiste à piloter un robot par des plantes. Notre partie consiste à fabriquer le robot appelé “Robot Go-West”. Une première version du robot est réalisée par d’autres personnes mais des inconvénients sont présents.
Au départ, le robot allait être utilisé à l’extérieur en utilisant un système chenille permettant de rouler sur un sol non plat.
Pour simplifier le projet, nous allons fabriquer “le robot Go-west light” un robot à quatre roues qui va fonctionner à l’intérieur avec 4 roues. Une fois que le robot marche, nous essayerons d’adapter le robot pour qu’il fonctionne à l’extérieur.
Nous n'avons pas construit de diagramme de Gantt ou de Pert pour représenter l'évolution du projet car nous n'avons pas de date limite de fin de projet.
Comment allons nous réaliser ce projet?¶
Pour réaliser notre projet nous devons comprendre notre besoin et de le développer pour retrouver les différents facteurs à prendre en compte pour, dans un second temps, construire nos solutions techniques.
1) Définition du besoin :¶
Nous sommes servis du diagramme bête à corne pour définir le besoin.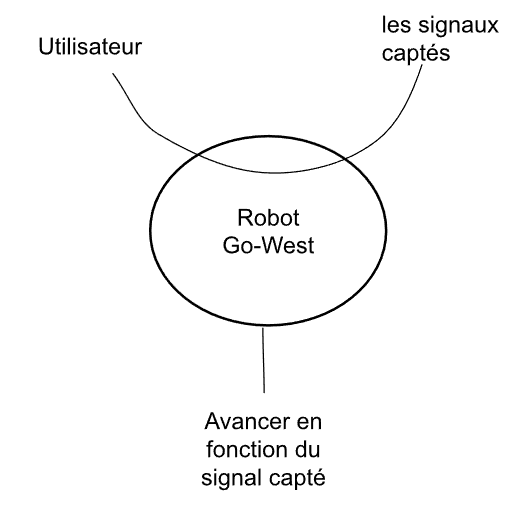
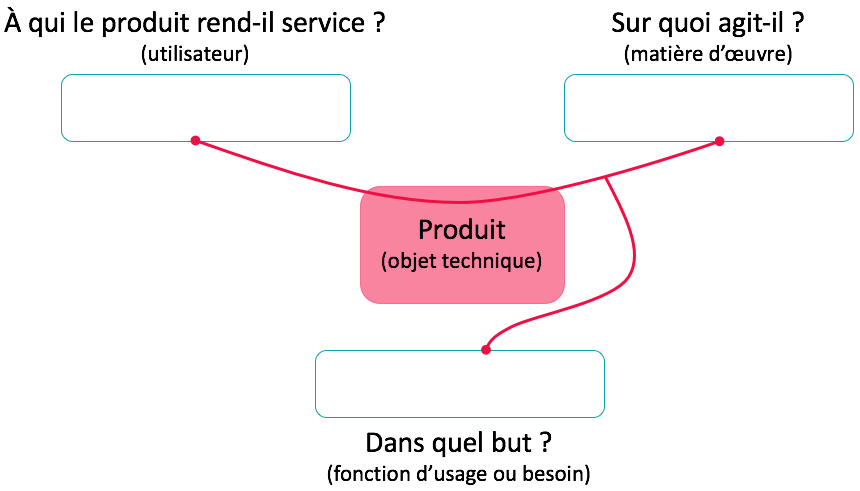
[[https://www.google.com/url?sa=i&url=https%3A%2F%2Fwww.maxicours.com%2Fse%2Fcours%2Fconstruire-un-diagramme-bete-a-cornes%2F&psig=AOvVaw3BD08yJfVvuo_QsZ_Li9uH&ust=1687294067338000&source=images&cd=vfe&ved=0CBMQjhxqFwoTCNi0na6a0P8CFQAAAAAdAAAAABAE]]
Notre système d'étude est le robot go west qui va rendre service à l'utilisateur en agissant sur les signaux captés sur les plantes dans le but d'avancer en fonction du signal capté.
2) Définir les éléments environnants et rédaction du cahier des charges fonctionnel :¶
Nous avons utiliser le diagramme pieuvre pour représenter les éléments environnants et présenter la fonction principale, les fonctions services et les contraintes d'adaptation.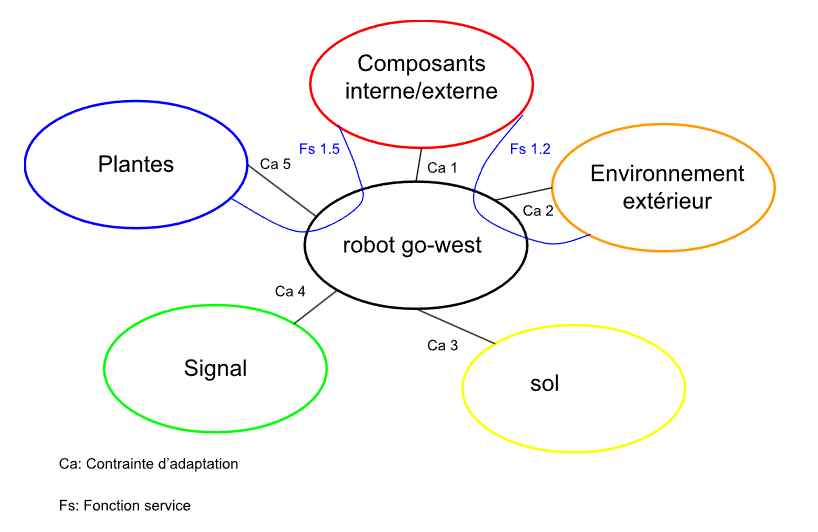
Nous avons les composants internes/externes, l'environnement extérieur, le sol, le signal capté par les plantes et les plantes comme éléments environnants. Ces éléments environnant interagissent avec le robot. Nous retrouvons deux fonctions services entre les plantes et les composants et les composants et l'environnement extérieur.
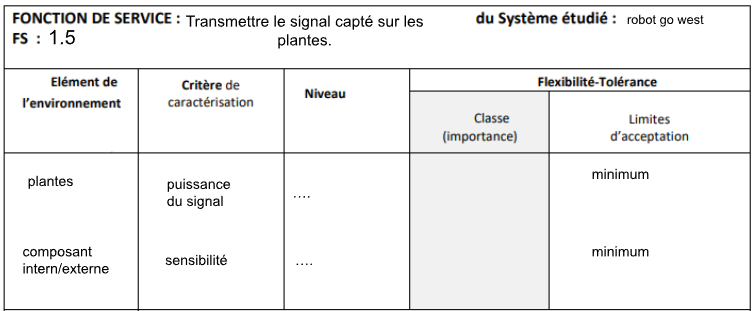
La première fonction service Fs1.5 (Fonction service entre l'élément environnant 1, les plantes, et l'élément environnant 5, les composants internes / externes du diagramme pieuvre): Transmettre le signal capté sur les plantes. La deuxième fonction service est Fs1.2: Protéger les composants intérieurs de l’environnement extérieur.
Pour répondre à ces fonctions services, nous étudions ou nous analysons ces fonctions comme dans les tableaux suivants: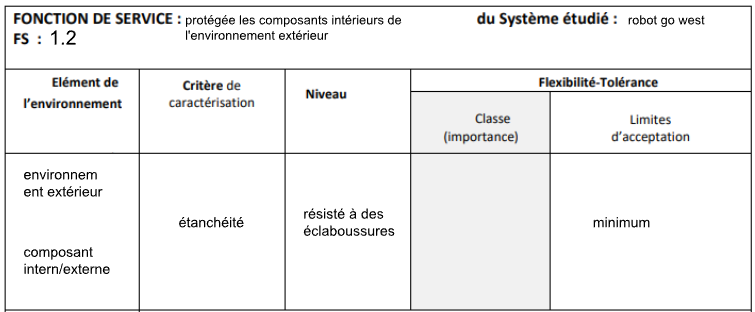
Nous concluons la partie CDCF par le diagramme FAST ( [[https://www.appvizer.fr/magazine/operations/gestion-de-projet/diagramme-fast]] ) suivant qui nous permet de voir les éléments à tenir compte pour la partie conception: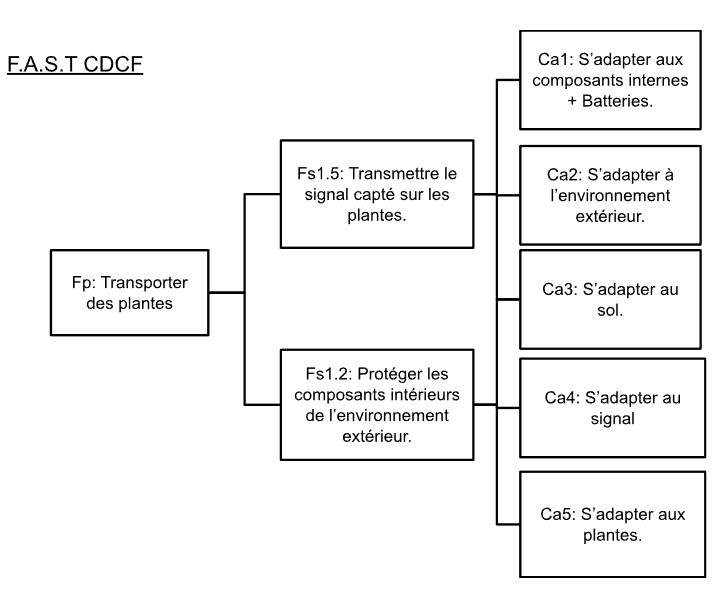
II) Conception¶
1) Recherche d'existant¶
Nous recherchons des éléments existants similaires à notre besoin. Cette recherche d'existant peut nous aider à construire nos solutions à partir de solutions existants. Nous pouvons aussi faire une recherche de brevets déposés, pour des solutions existants, pour tenir compte pendant le choix de nos solutions.
Actuellement, nous n'avons pas trouvé de produit identique à ce que nous souhaitons réaliser. Les deux liens suivants montrent deux articles ayant des points communs avec notre projets: [[https://www.sciencesetavenir.fr/high-tech/robot/gaia-l-incroyable-projet-de-cyborg-vegetal_92730]], [[https://curiokids.net/quand-lintelligence-des-plantes-est-exploitee-par-les-robots-decouvrez-lexpo-plant-fever-au-centre-dinnovation-et-de-design-du-grand-hornu/]].
2) Développement du besoin et diagrammes fonctionnelles¶
Développement de la partie commande (gestion du signal):
Développement de la partie architecture du robot:
Développement de la partie de puissance:
Développement de la partie mouvement du robot:
Composants retenus:
Diagramme FAST de la partie conception: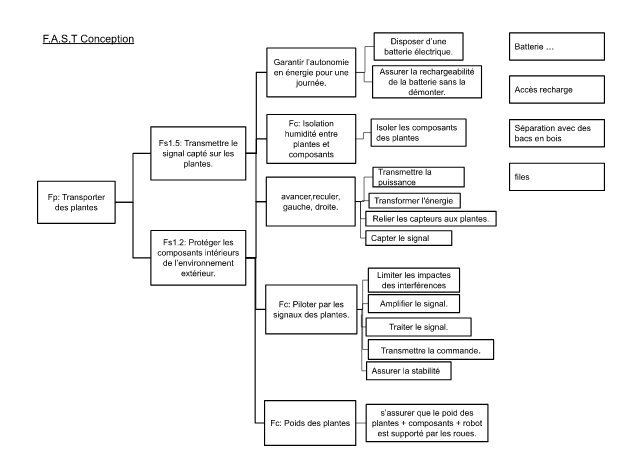
(Le diagramme FAST de la partie conception n'est pas fini. Il manque les solutions techniques à trouver et peut être reprendre le développement du diagramme FAST de la partie conception.)
3) proposition de solution¶
Nous proposons ici des solutions qui peuvent répondre à notre besoin. Nous gardons la solution la plus adaptée.
4) Conception préliminaire et conception détaillée¶
Une fois que le choix de solution est effectué nous faisons une représentation la solution retenu sur papier. Puis, nous modélisons notre solution sur FreeCAD en mettant les cotes, etc.
4.1) Conception préliminaire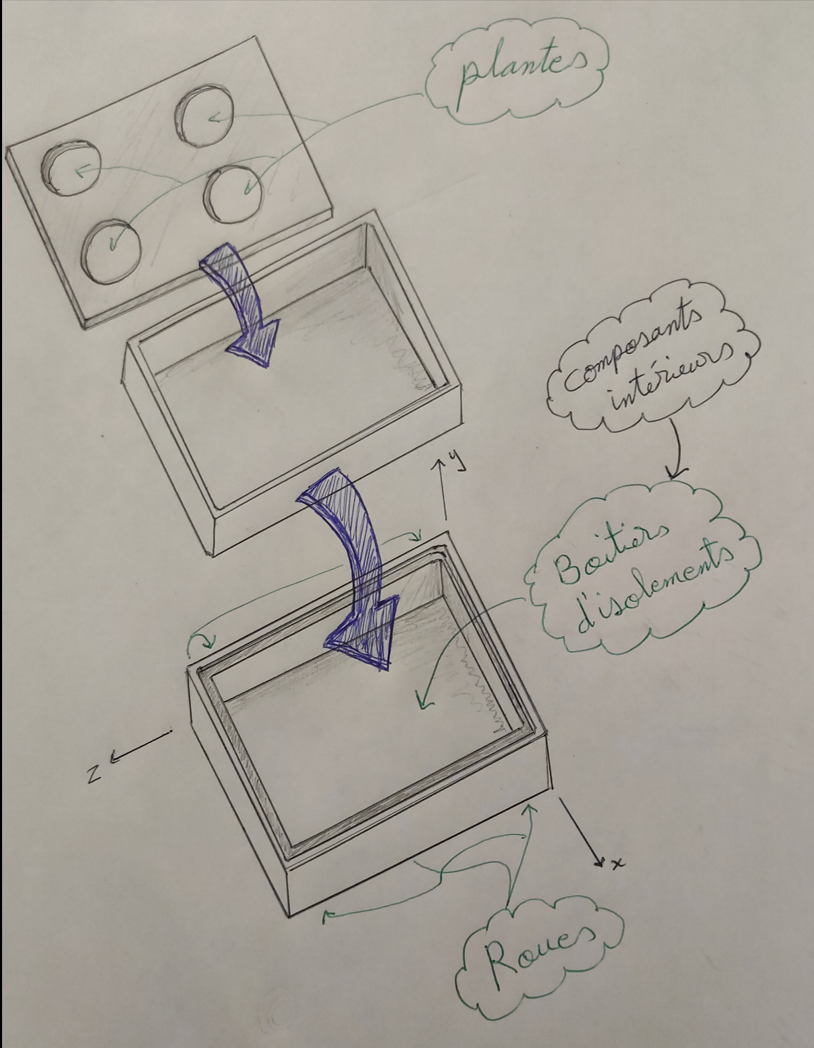
4.2) Conception détaillée
5) Prototypage¶
Cette partie sert à réaliser une première version de notre robot pour vérifier son fonctionnement.
III) Fabrication¶
(Nous ne pouvons pas démarer notre production car nous n'avons pas fini la partie conception. Nous réalisons en premier un prototype. Quand le prototype est validé, nous pourrions passer à la partie production)
La fabrication du robot Go-West se fait avec les ressources disponibles au FABLAB Cohabit. Nous pouvons utiliser l'impression 3D et la découpe laser pour réaliser certains éléments. Nous pouvons également utiliser des composants standards.
Commentaire et paln d'action¶
Commentaire¶
Nous avons pris pour le semestre 2 de l'année universitaire 2022/2023 un AOP engagement au FABLAB Cohabit et nous avons travailler sur le projet communication racinaire sur le robot Go-West. Nous avons réalisé le CDCF pour ce projet et quelques éléments pour la partie conception. La partie fabrication est à réaliser après la partie conception.
Plan d'action à suivre pour continuer le projet:¶
Reprendre la partie conception pour corriger les erreurs (s'il y en a), Caractériser et tenir compte des contraintes, déjà vus, dans la partie "développement et diagrammes fonctionnelles", trouver les solutions techniques qui peuvent répondre à notre besoin).
Des composants sont séparés en deux boites. Nous proposons de réaliser les boitier en plaque de dibont regroupés et assemblés par des équerres et des vis et isolés avec du scotch aluminium.
Il faut aussi faire la CAO du robot, fabriquer un prototype et le valider (ou reprendre la partie conception s'il y a des erreurs).
A la fin, nous pourrions proposés une fabrication du robot avec d'autres moyens de productions et nous pourrions aussi développer le projet pour que le robot puisse fonctionner à l'extérieur.