Robot Go-West¶

Résumé¶
Cette partie du projet est dédiée au véhicule à chenilles qui sera piloté par les plantes et plus précisément qui devra essayer de rattraper le soleil. Ce robot est nommé Go-west et notre but est de concevoir à la fois la partie assemblage mécanique de ce robot, mais également la partie signal, et plus précisément transformer le signal reçu par les plantes en commandes pour les moteurs.
D'un point de vue plus schématique, nous devons donc nous assurer de suivre la boucle suivante :
Introduction¶
L'objectif du projet est de construire un robot se déplaçant à l'aide de chenilles de manière autonome.
C'est à partir des signaux émis par les plantes que le robot devra se déplacer vers le point le plus éclairé, son but est donc de poursuivre continuellement le soleil. Pour ce faire, il faut donc s'assurer de la validité de la partie signal de la boucle. Vous pourrez retrouvez des informations sur cette boucle ici :[[https://projets.cohabit.fr/redmine/projects/communication-racinaire/wiki/Transformation_du_signal_racinaire_en_son_(TSRS)]]
Cette page du wiki sera dédiée à la partie assemblage du robot, au programme de contrôle des roues tout d'abord via des instructions basique puis grâce aux signaux émis par les plantes.
Robot léger¶
Une version de robot léger est menée par Saïf
voir ticket
Robot Chenille (lourd)¶
Analyse fonctionnelle¶
On commence par une analyse fonctionnelle de l'objet que l'on veut créer https://fr.wikipedia.org/wiki/Analyse_fonctionnelle_(conception)#Analyse_fonctionnelle_externe
Besoins :
- porter 4 plantes avec leurs pots (5kg max de charge utile)
- tout-terrains (et à chenilles)
- piloté par les plantes
- autonomie: 2 heures / batterie
Taille :
- taille du robot, largeur de la plateforme (26x31 cm)
Sources¶
Plans_et_pièces_mécaniques
Code Sources C et Python
Chenilles¶
Calcul de la taille des roues dentées
https://www.toutcalculer.com/geometrie/surface-decagone-regulier.php
L'assemblage des chenilles se fait à l'aide des pièces imprimées en 3D et de fil d'étain que l'on insère dans les trous des pièces de chenille. Nous avons choisi de faire alterner les couleurs. Le rendu final d'une chenille est le suivant :

Ressorts TPU (amortisseurs)¶
Nous avons fait le choix technique d'ajouter des ressorts au système de roulement de la chenille. Cela garantira la bonne tenue de route du robot, même sur des surface non planes. Les ressors amortiront les chocs et permettront à la chenille d'être plus souple.
Voici leurs propriétés :- entraxe max 42 mm
- entraxe min 33 mm
- diamètre bague inter 7mm
Cette photo montre le rendu final : 
Assemblage¶
La caisse¶
Les 4 côtés et le fond de la caisse sont à coller avec la colle à bois.
Attention à ne pas vous tromper de sens, et à vérifier que les trous s'emboîtent correctement.
Les drivers¶
Visser les drivers à l'arrière de la caisse, juste derrière les moteurs. Veillez à bien les positionner avant de placer les blocs moteurs.
Les références sont renseignées dans la liste de matériel ci-après : [[https://projets.cohabit.fr/redmine/documents/244]]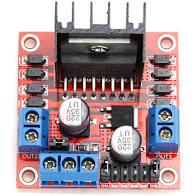
Les boîtiers moteur¶
Les boîtiers moteur font partie des pièces qui ont été imprimées.
Le boîtier moteur est ensuite refermé et fixé au reste de la caisse pour qu'il soit stable et ainsi éviter les arc-boutements.
Les moteurs actuels étant trop puissant pour un robot de cette taille, ils seront remplacer par des moteurs de même taille mais moins puissants.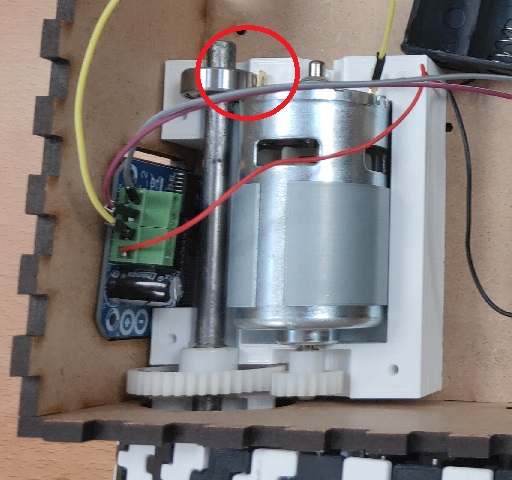
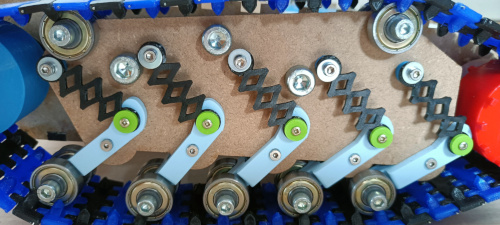
Les portes chenilles¶
Les portes chenilles sont composés de 2 emplacements pour les roulements ainsi que 5 emplacements pour fixer des biellettes (en bleu clair sur l'image).
Celles-ci sont reliées aux ressorts et possèdent chacune un roulement.
Ils sont également composés de 3 trous pour les fixer au boîtier principal.
Mise en place des éléments sur la caisse¶
L'objectif est de se référer au modèle FreeCAD disponible.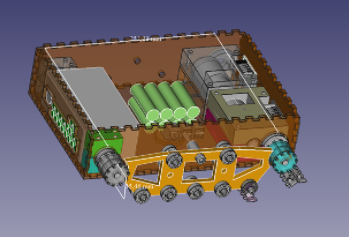
Fabrication¶
Tous les fichiers pour l'impression 3D et la découpe laser sont ici : https://projets.cohabit.fr/redmine/documents/255
Plans et pièces mécaniques
Liste du matériel [[https://projets.cohabit.fr/redmine/documents/244]]
[[https://projets.cohabit.fr/redmine/documents/255]]
Pour la construction du robot, veuillez vous rendre à cette page du wiki : [[https://projets.cohabit.fr/redmine/projects/communication-racinaire/wiki/Bio-Bot#section-4]]
Branchement Drivers Moteur¶
https://raspberry-lab.fr/Composants/Module-L298N-controleur-moteur-Raspberry-Francais/?repID=481
Programme de pilotage des moteurs¶
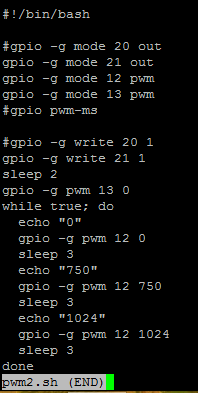
Nous avons tout d’abord manipulé sur un seul moteur bien que l’objectif à terme étant de pouvoir piloter deux moteurs simultanément. Tout d’abord, nous avons testé les branchements à l’aide de commande en Bash. Celles-ci ont permis de confirmer les branchements sur les bons drivers et les bonnes commandes. Le code ci-dessous en Bash permet de faire tourner le moteur à différentes vitesses à intervalles de temps.
Nous avons ensuite créé un code python ( test_moteurs.py dans les fichiers en bas de la page) permettant de faire tourner les moteurs en boucle à différentes vitesses. Ce code devra être modifié dans la suite du projet afin de donner des ordres précis selon le signal récupéré. Afin de faire ce code, nous nous sommes servis de la librairie RPi.GPIO. Il s’agit d’initialiser les différents pins (EN : enable, pour activer les moteurs, PWM : Pulse-width modulation, pour gérer la vitesse de rotation). Il y a deux pins PWM afin de pouvoir gérer le sens de rotation : chacun gère un sens. On active les moteurs, initialise les PWM selon une fréquence qu’on a défini par défaut à 585. Ensuite, dans notre boucle on change la vitesse des moteurs via un pin PWM et la commande ChangeDutyCycle (allant de 0 à 100).
La chaîne moteur est donc fonctionnelle, mais nous avons rencontré quelques problèmes au niveau de la logistique de la caisse.
Pour la suite¶
- Refaire des tests sur les moteurs en fixant pour éviter l'arc-boutement des moteurs.
- Analyser les signaux des plantes et l'état de l'art existant pour identifier l'exposition au soleil. (Contacter les membres de Vegetal Signals qui sauront vous aider)
- Programmation d'un code permettant de traduire les signaux en instructions pour les drivers.
- Finir l'assemblage du robot.
Résultats¶
Historique de l'avancée
Mars 2021 : Découpe d'une nouvelle caisse avec des dimensions différentes pour que toutes les moteurs et arbres moteurs puissent s'insérer correctement
Avril 2021 : Pilotage des moteurs en Python à l'aide du Raspberry pi
Test sur les moteurs avec le nouveau driver => OK
Test du moteur dans la caisse avec la chenille => A améliorer
Test du moteur sans la chenille avec la roue dentée => Fonctionne, mais le couple du moteur n'est peut être pas assez élevé.
Bibliographie¶
Pilotage des moteurs
https://www.aranacorp.com/fr/pilotez-un-moteur-cc-avec-raspberrypi/